1、必须对转子进行平衡,使其达到允许的平衡精度等级,或使因此产生的机械振动幅度降在允许的范围内动平衡校正前,首先计算好试重信息,三个质量块质量分别默认为单位 1,如下图指示 在仪器“计算器”功能里分两步计算:
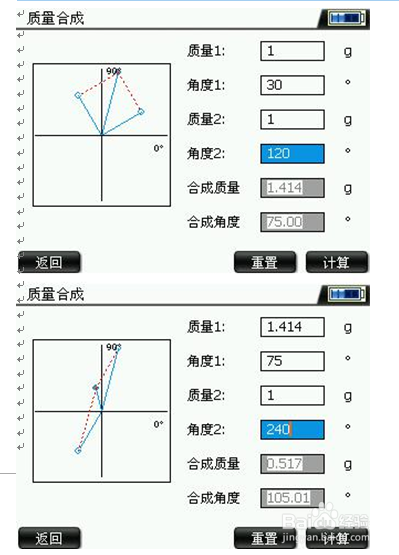
2、现场平衡概念和必要性常用机械中包含着大量的作旋转运动的零部件,例如各种传动轴、主轴、电动机和汽轮机的转子等,统称为回转体。设备分别添加三个质量块在 0°、120°、240°,旋转设备,测量初始振动。停机将 0°质量块移至 30°,120°、240°两个质量块角度保持不变,将上图计算结 果:质量 0.517g,角度 105.01°输入仪器试重信息栏里面即可。如下图所示:

3、在转子一个校正面上进行校正平衡,校正后的剩余不平衡量,以保证转子在静态时是在许用不平衡量的规定范围内,为静平衡又称单面平衡。启动设备,按照动平衡正常步骤测量试重后的振动信息,例如仪器计算校正结果如下:
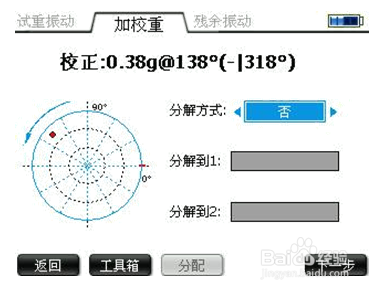
4、在转子两个校正面上同时进行校正平衡,校正后的剩余不平衡量,以保证转子在动态时是在许用不平衡量的规定范围内,为动平衡又称双面平衡。对 0.38g 和 138°进行角度分解,仪器分解方式选择:到固定质量,分解到 1、2:两栏 分别输入单位 1,点击仪器按钮“分配”进行计算。如下图所示:

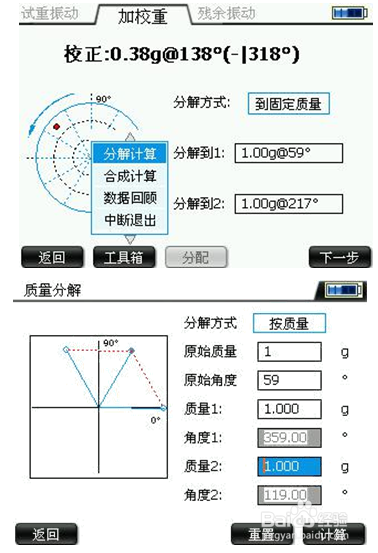
5、仪器计算结果为质量块一放置角度 59°,质量块二放置角度 217°,但实际设备是有三 个质量块存在,所以还需要继续分解一次,如下图所示首先选择“工具箱”功能,其次选择 “分解计算”,对质量块一进行再次分解计算。按照最终计算结果,三质量块分别放置角度 为:359°、119°、217°。
6、如何选择转子的平衡方式,是一个关键问题。按照计算结果添加质量块完成后,启动设备测量残余振动量,如需要继续校正,可按照 上一步到固定质量分解计算运用即可。