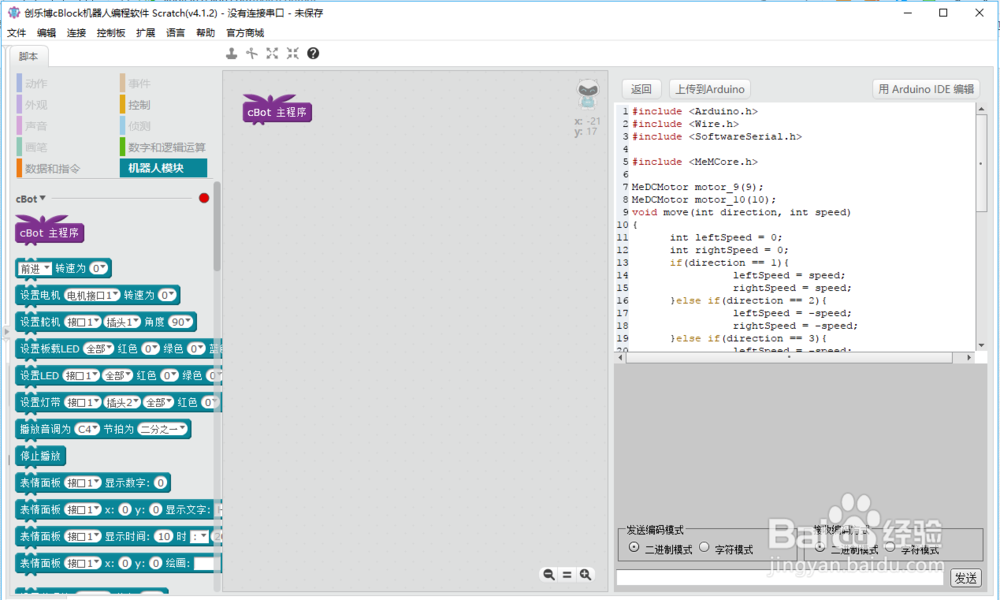
1、新建项目,启动机器人模块
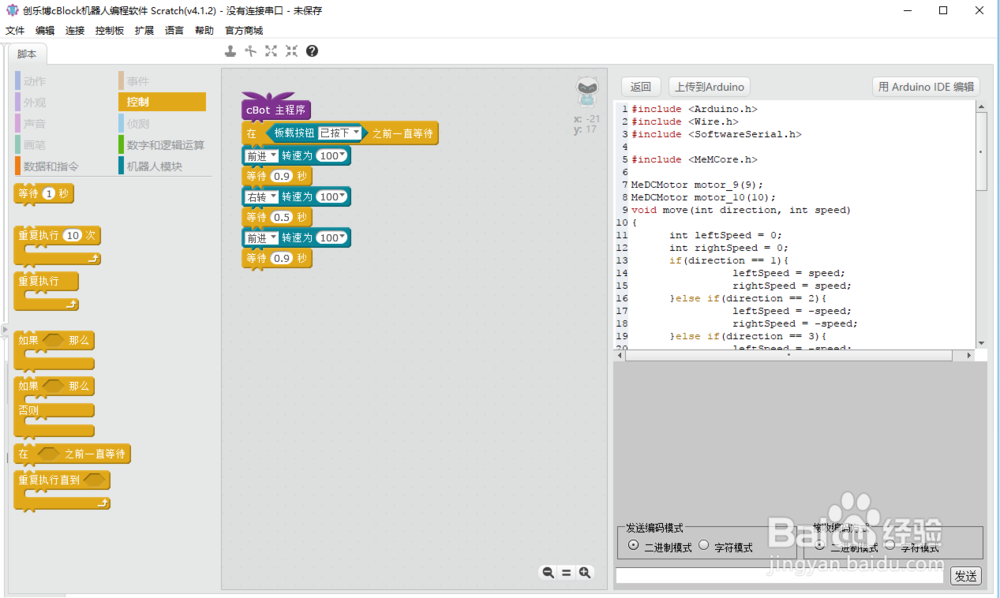
2、设置触发条件
3、板载按钮按下,执行下列命令
4、小车向前跑,转数100
5、小车运动时间0.9秒
6、小车右转,速度100,持续时间0.5秒
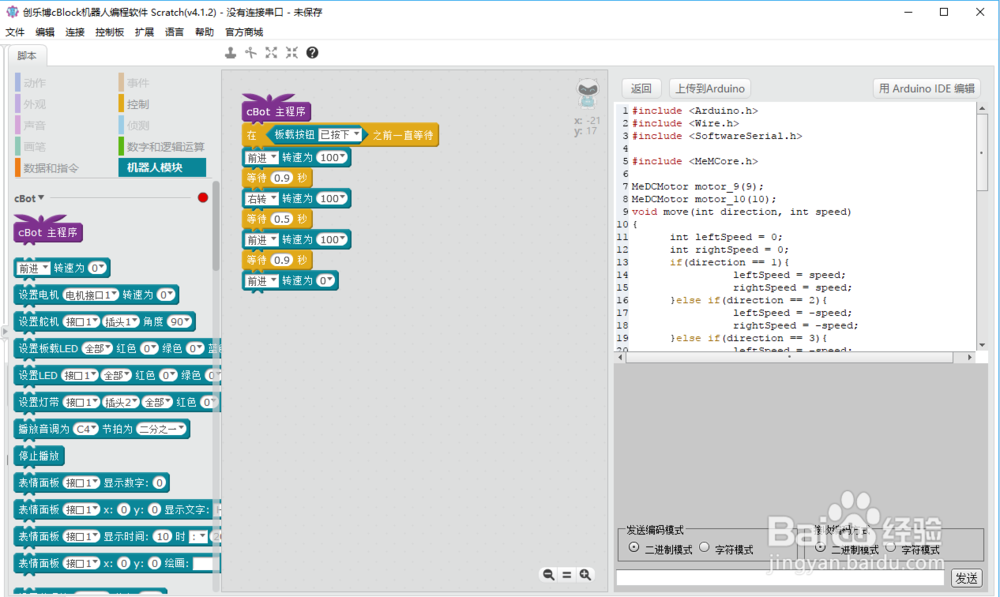
7、前进,转数100,跑动时间为0.9秒
8、停车