1、小编先打开声控灯机器人作为例子,从名字上就知道它的功能。
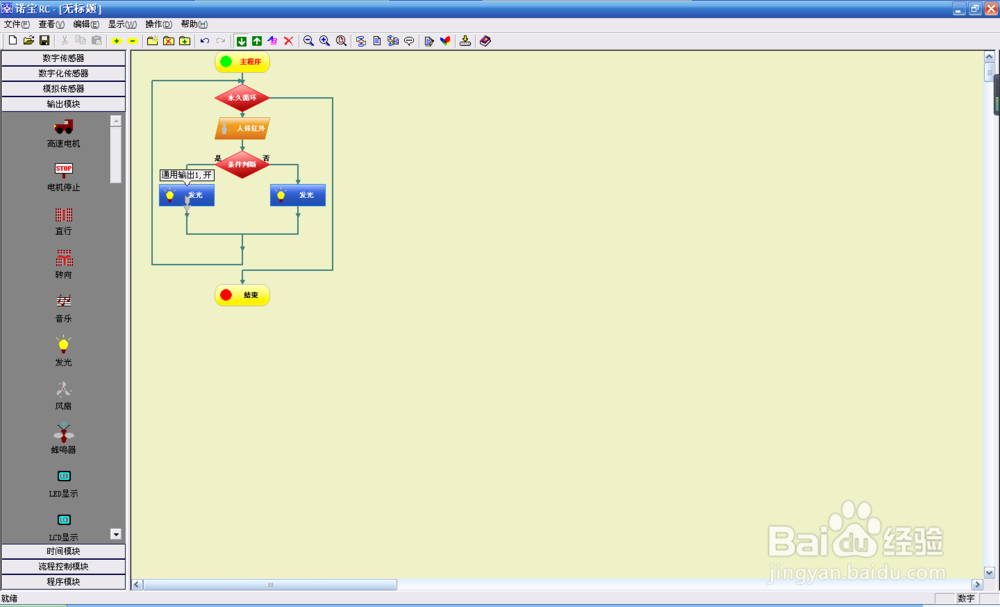
2、点击“仿真”,进入仿真页面,添加好传感源。
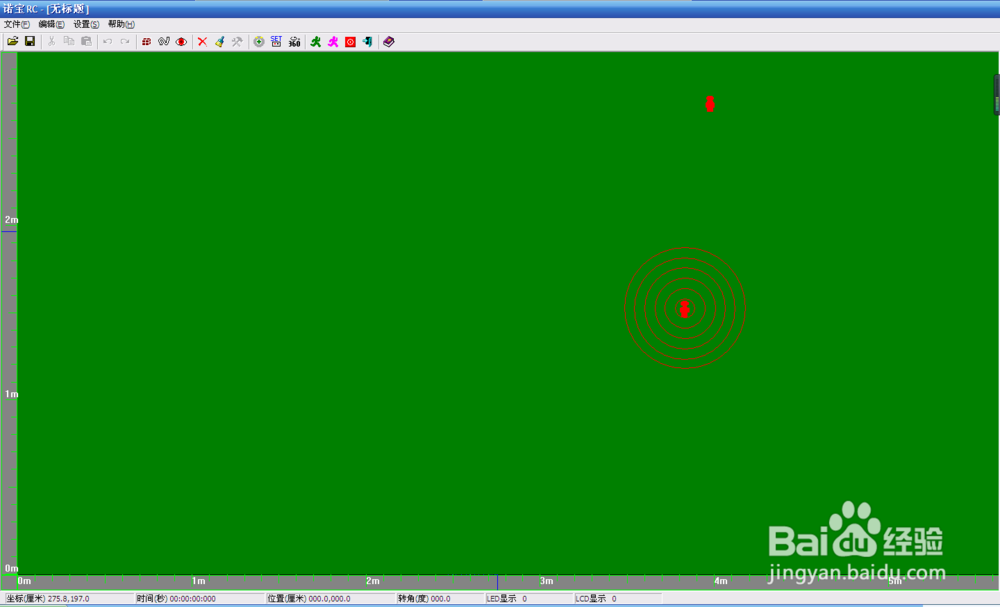
3、鼠标左键长按,显示选择框,用该框选择要移动的传感源,然后松手。
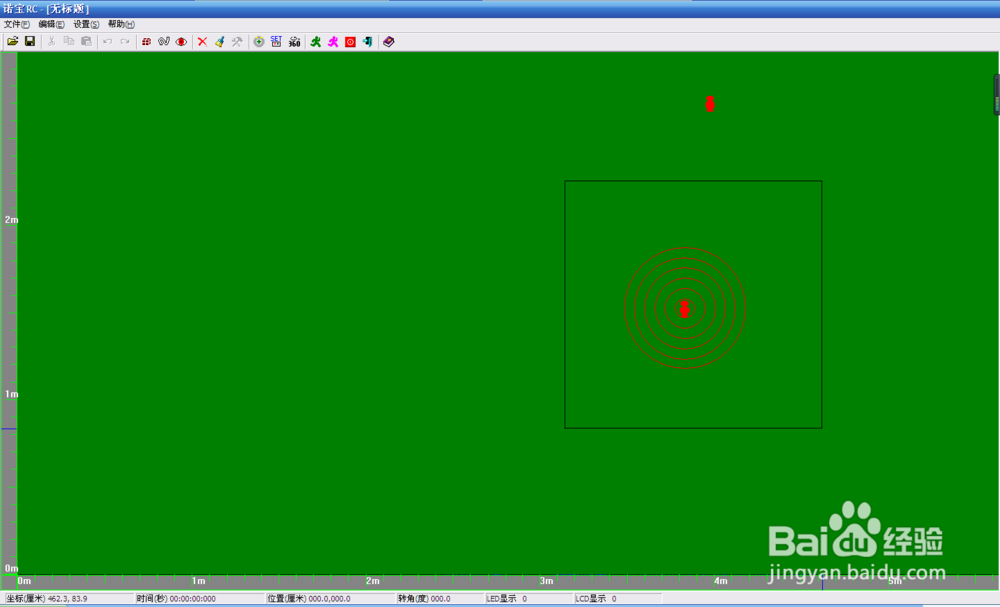
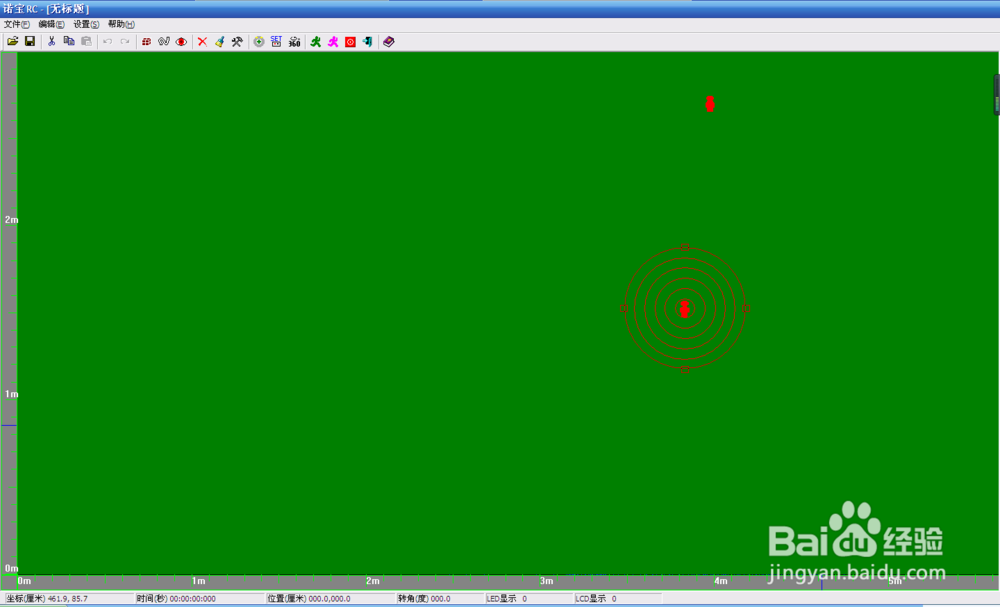
4、点击传感源拖动就可以移动它了,如果选错了,再点击右键取消即可。
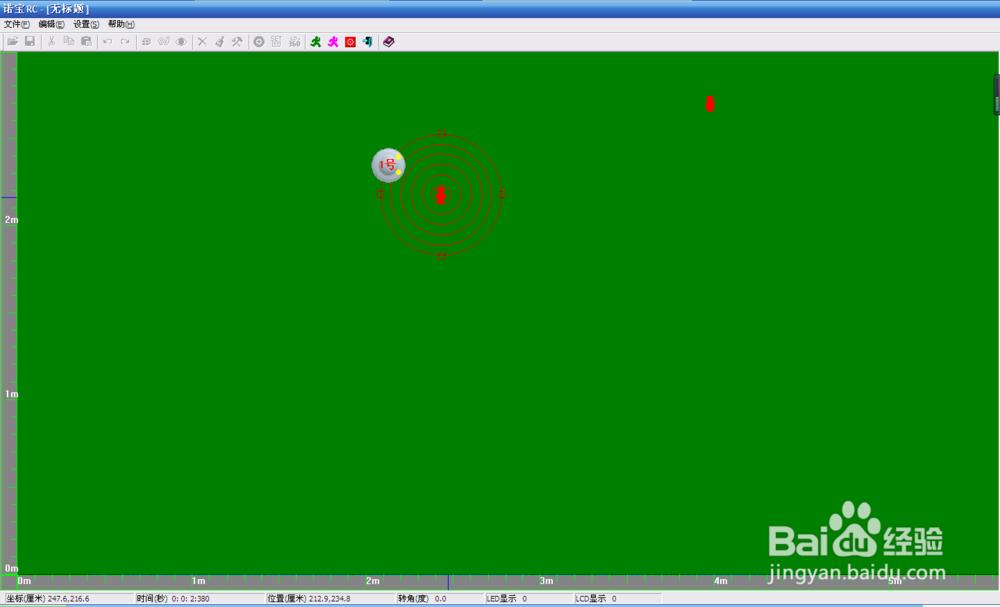
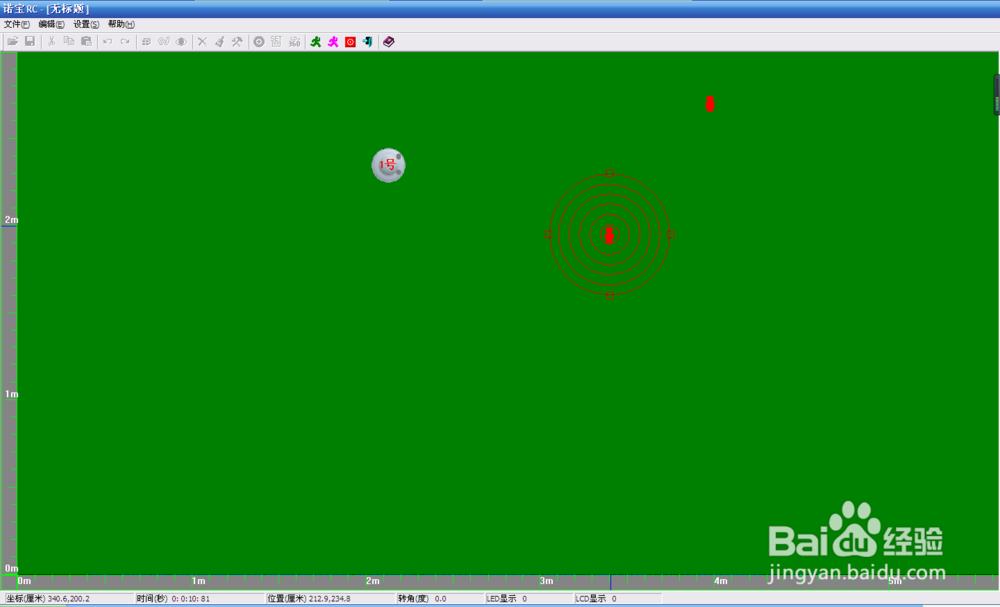
5、进入仿真状态。如图,当机器人接触到传感源时会发光,离开时不发光。
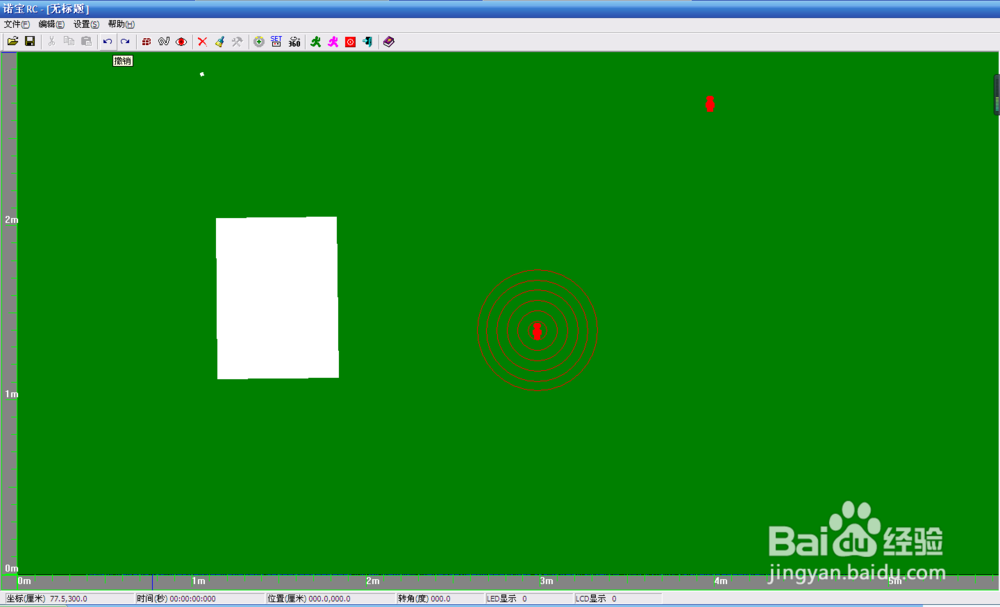
6、不仅仅是传感源,色带和障碍物都可以用相同的方法移动。

7、如果移动错误也可以按“撤销”键撤回。
1、进入仿真或3D仿真后,就不能点击左键选择区域了。
2、如果此经验对你有用,记得要投票并分享哦!
