1、首先我们搭建驱动底座,整个驱动底座用到了两个大型电机,我们这里仅展示一个的搭建方式,另一个与之对称即可。
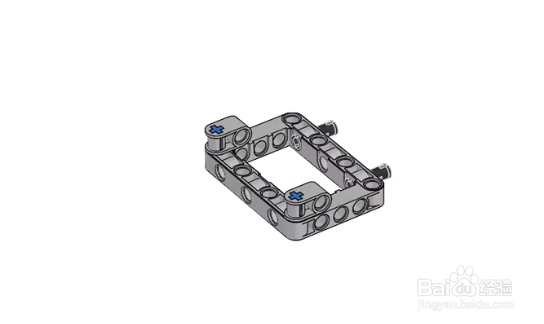
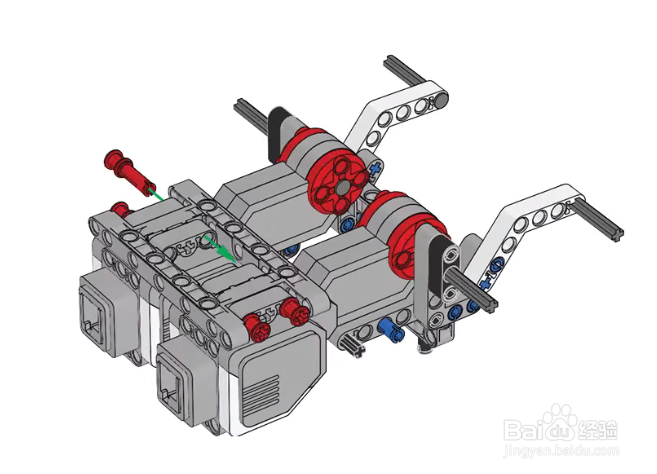
2、然后我们搭建连接两个电机的支架,两个电机需要用两个支架连接,我们先做其中的一个,搭建图如下图所示:
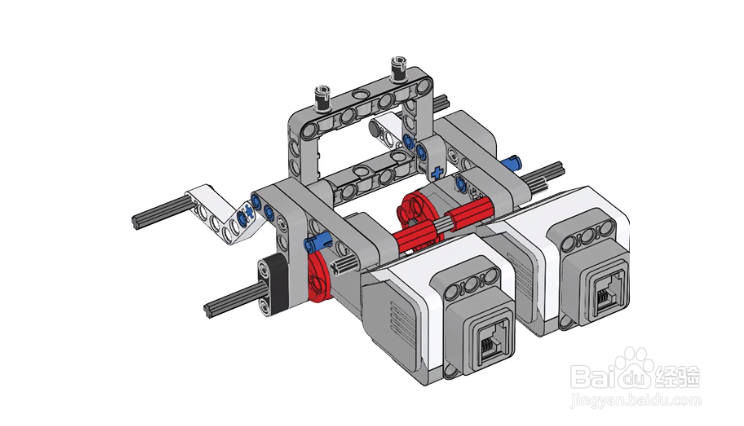
3、搭建好连接用的支架后,我们将两个大型电机与我们搭好的方框连接起来,如下图所示:
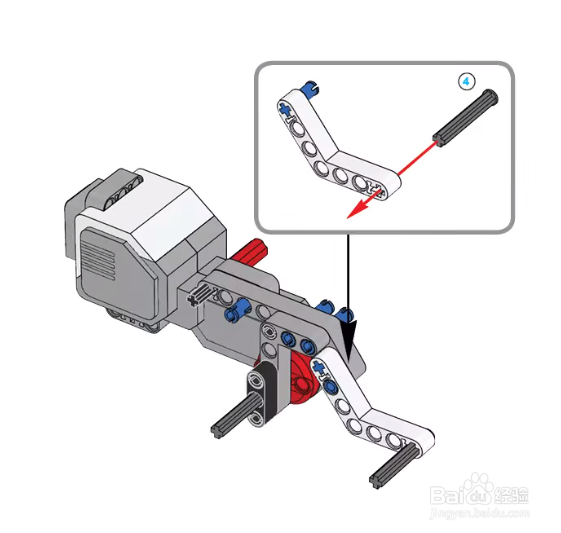
4、连接固定好之后我们将作品翻转,然后在背面利用的长支架进行固定,同时用长鞘固定好。
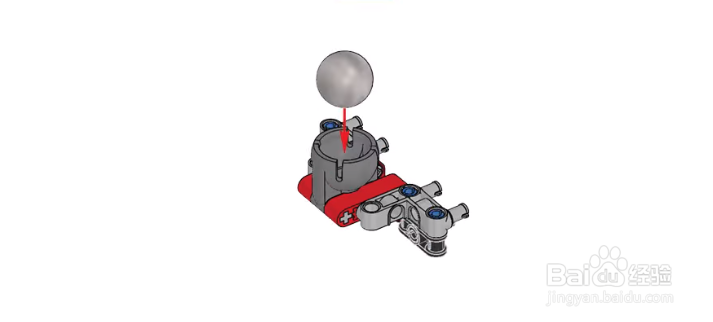
5、完成之后我们进行下一步,安装我们的万向轮,万向轮的制作如下图所示,安装位置为车身底部。
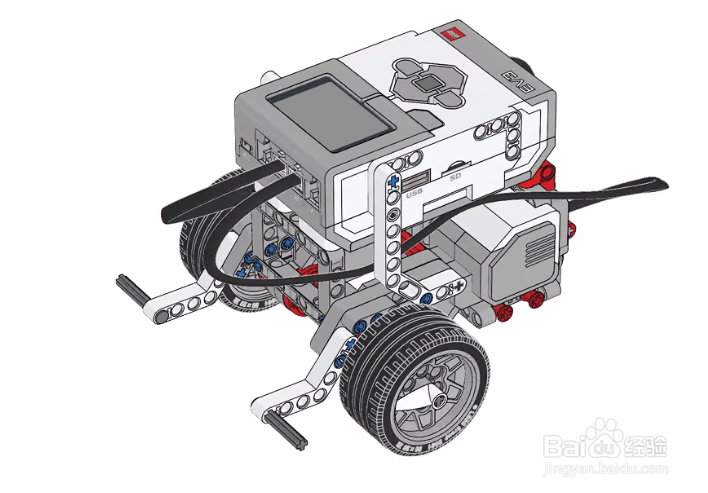
6、最后在前方加上角梁,在上面加上EV3的主机,我们的基础小车就完成了,然后我们继续进行下一步。
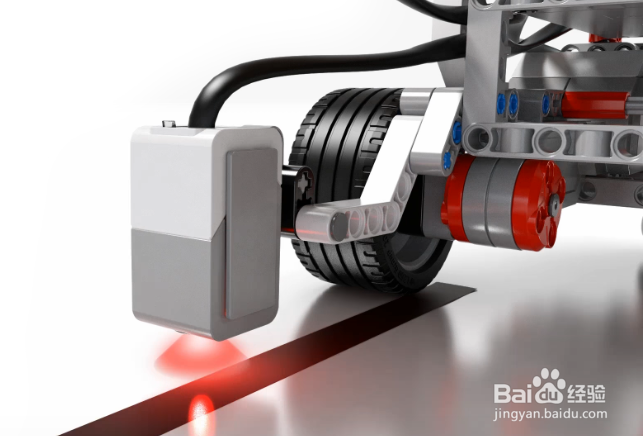
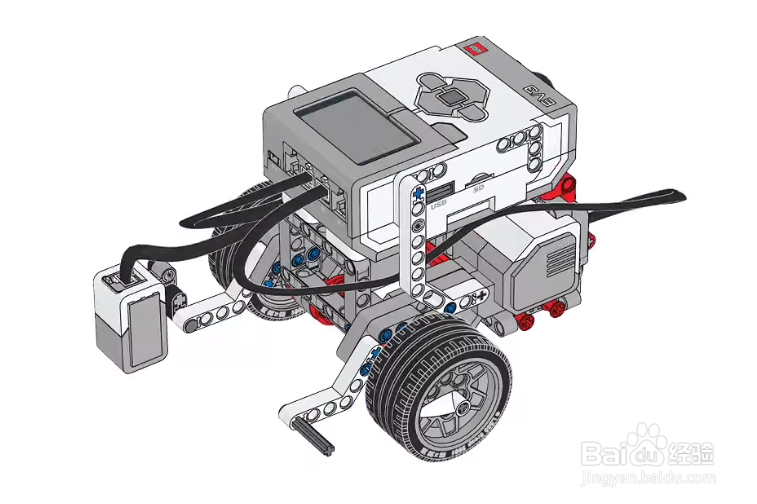
7、最后一步就是将我们本节课的主角加上,颜色传感器,颜色传感器的安装十分简单,这里不再赘述,也可以参考下图。
1、利用颜色传感器来分辨轨道痕迹,通过 ev3 控制器里的程序来控制机器人让它按照既定的路线行走。
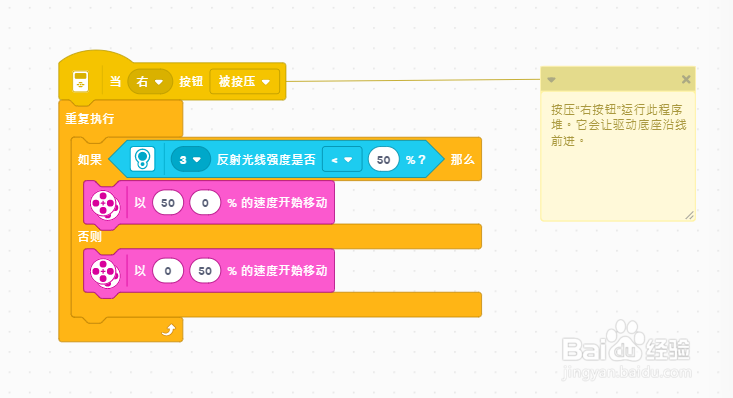
1、我们的机器人程序使用的是哪个传感器?这个传感器模块里的设置内容为什么要如此选择?
2、我们的切换模块的上下分支程序对换,机器人行驶会不会有区别?如果会,又是怎么样的区别?
3、我们机器人的电机运转功率为什么不调到最大值?