1、架站扫描
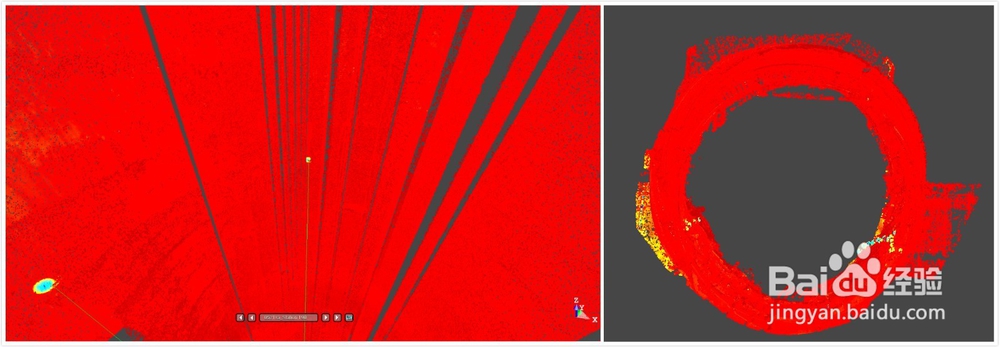
为了控制数据质量,确保数据精度,每一站扫描时都需要对仪器进行调平。先在低处将仪器调节至精确水平,然后设置扫描档位为Level2(3min),延时操作为3min。在将仪器升高到3.5米高度以上(现场观察摇杆上缠绕的钢丝圈数超过7圈)。扫描结束后,待仪器界面出现点云预览图,再将仪器往下降。
竖井内部雾气非常重,成为了激光扫描的最大制约因素。因此我们需要打开通风风门,从地下540米三水平处,从下向上进行扫描。
1)基于标靶目标的拼接:在两个测站中,分别拟合提取出现场布设的靶球目标,对两个测站之间的公共目标做匹配。完成测站的拼接。
2)基于扫描点云的精化拼接:根据点云的空间几何特征,对测站拼接进行优化并给出拼接误差报告。
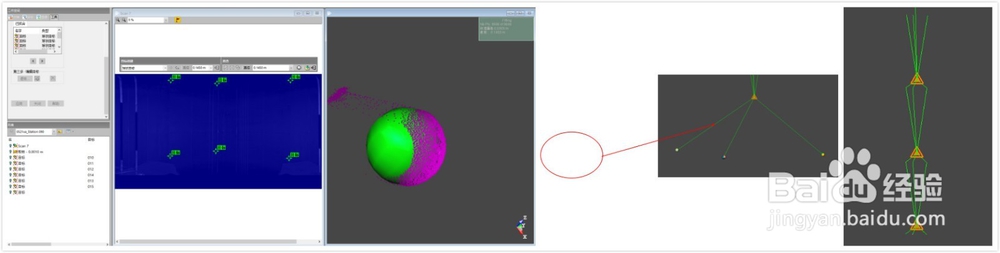
2、地理坐标转换
本次竖井扫描从一水平到三水平高差达到540米,而串接两个测站的靶球分布很集中,在进行测站拼接时,不可避免的会出现线性累计误差。因此需要在地面与地下分别布设地面控制点来纠正。使用Trimble Realworks进行地理坐标转换时,先提取出控制点处的靶球目标,再赋予其控制点坐标和靶球高度,软件会计算出各个控制点的残差值并进行平差。