第一步、将机器人放置在初始(充电桩)位置后开机,并确保机器人的急停开关在弹开的状态如图.1所示。

请记住您摆放机器人(充电桩)的位置,及朝向,该位置为您未来导航模式中机器人的出发位置。每次启动导航模式时,都需确保机器人在该位置上。
第二步、确认机器人的网络连接正常,有互联网连接可以拨打视频通话。
第三步、使用您的手机,打开艾米机器人手机应用,并找到您的机器人,选择监控模式(该模式需要机器人账号与手机账号互为家人关系,设置方式参见说明书)拨打机器人账号,如图.3所示。

第四步、在进入监控模式后单击手机视频界面中左上角的按钮,如图.4所示。
导航/建图功能启动按钮

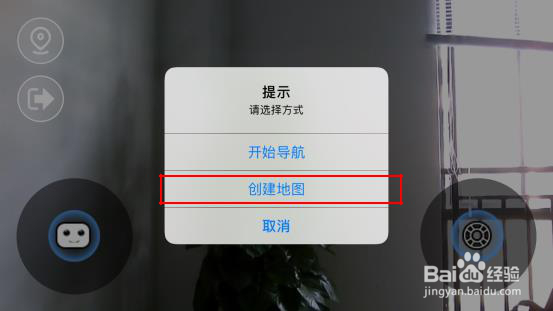
第五步、根据提示首先确认机器人的位置,单击确认按钮(如图.5)。再随后跳出的提示框中,选择创建地图按钮如图.6所示

第六步、在启动建图模式成功后,手机屏幕的上方会出现“建图中。。。”的文字提示,接下来遥控您的机器人,在要建图的区域进行扫描。小贴士:
可尽量采用蛇形的方式使艾米尽可能的扫描到您房间的每个角落。对于较空旷的环境,可选择在不影响机器人运动的地方放置一些椅子大小的障碍物。在运动过程中,请尽可能的避免碰撞,小心操作。对于要构建地图的房间,可以多扫描几次,让机器人多走几次。
第七步、添加导航点。
在构建地图的过程中,可添加导航目标点,请在将机器人遥控至指定地点后,单击屏幕右上角的图标,输入目标点的名称并保存,如图.7~8所示
建图状态提示
记录导航目标点按钮


图.8
第九步、在遥控机器人在要构建地图的环境中扫描及放置坐标点完成后,遥控机器人回到初始点(充电桩)位置,并单击屏幕左上角按钮,保存地图,如图9~10所示。
保存地图按钮


第十步、保存成功后,可在机器人端,应用软件showmap中查看您所构建的地图,如果满意,您即可开始导航模式,若地图质量不好,请重新第1~9步,再次构建地图。