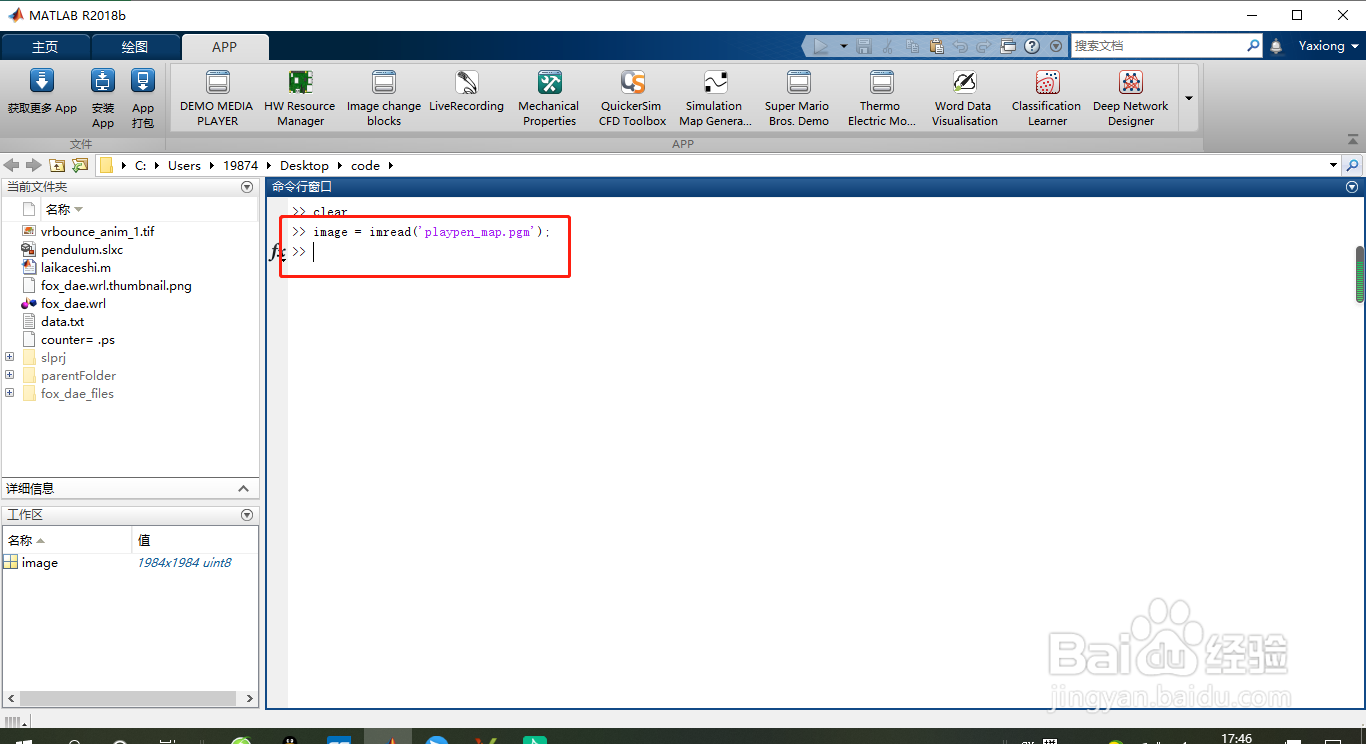
1、%使用imread导入图像。
命令行键入:
image = imread('playpen_map.pgm');
2、%裁剪图像到相关区域。
命令行键入:
imageCropped = image(750:1250,750:1250);

3、%显示图像。
命令行键入:
imshow(imageCropped)

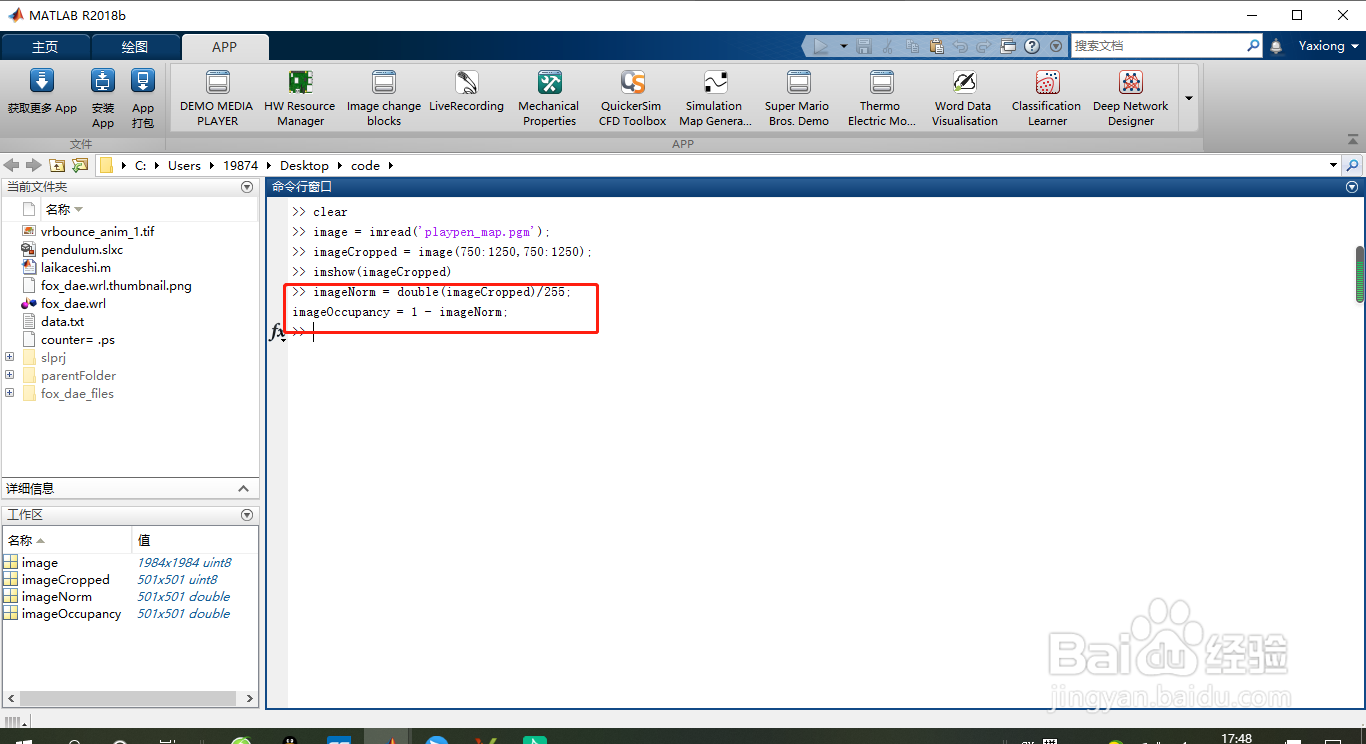
4、%PGM值从0到255表示为uint8。通过将裁剪后的图像转换为两倍并将每个单元格除以255来对这些值进行规范化。此图像显示了接近0的obstaclesas值。从1减去规范化的图像,得到占用值1表示占用空间。
命令行键入:
imageNorm = double(imageCropped)/255;
imageOccupancy = 1 - imageNorm;
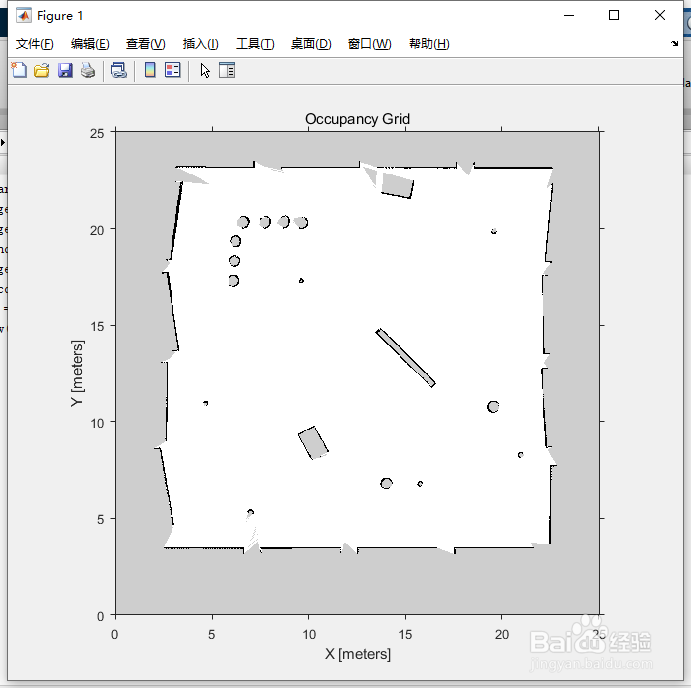
5、%使用调整后的地图图像创建占用网格对象。导入的mapresolution是每米20个单元。
命令行键入:
map = robotics.OccupancyGrid(imageOccupancy,20);

6、%显示图像。
命令行键入:
show(map)