1、搭建主体展示图如下图所示,同样是车体结构搭建难度一般,这里我们用到了光电传感器。

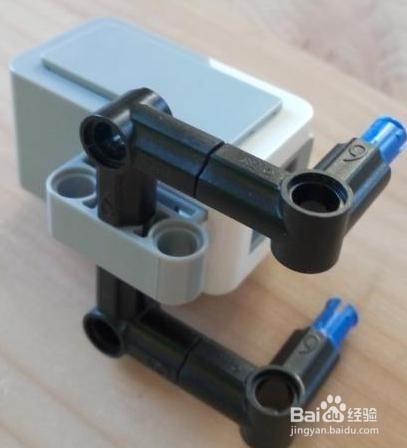
1、光电传感器细节:
我们先搭建我们的光电传感器,搭建细节如下图所示,这个部位用到的零件不是很多,难度不高。
2、伺服大电机细节:
固定大电机,大电机的固定主要用到的是角梁,这也是我们最常用的固定电机的零件,轮子选择中型轮子即可。

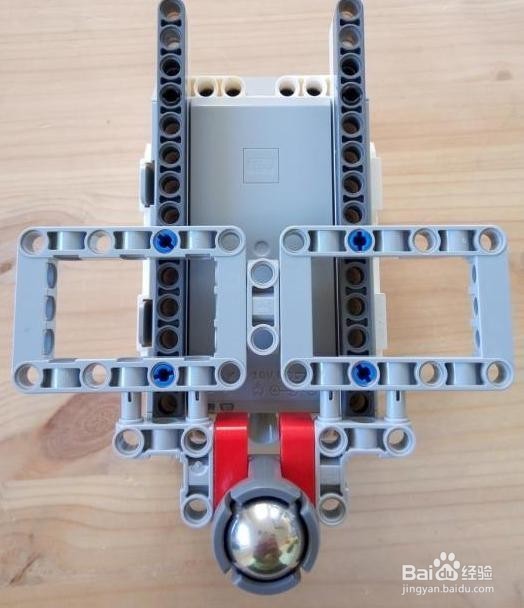
3、万向轮细节:
万向轮的安装主要用到了马形插销,这一部分在基础小车的搭建过程中我们经常复习所以难度同样不高。

4、底部框架细节:
机器人底部和万向轮固定如下图,这里用到了并排两个框架,多出的部分是为了安装电机,
5、最后将上述的四部分拼接在一起并加上简单的装饰,我们的斗牛机器人就彻底完成了。

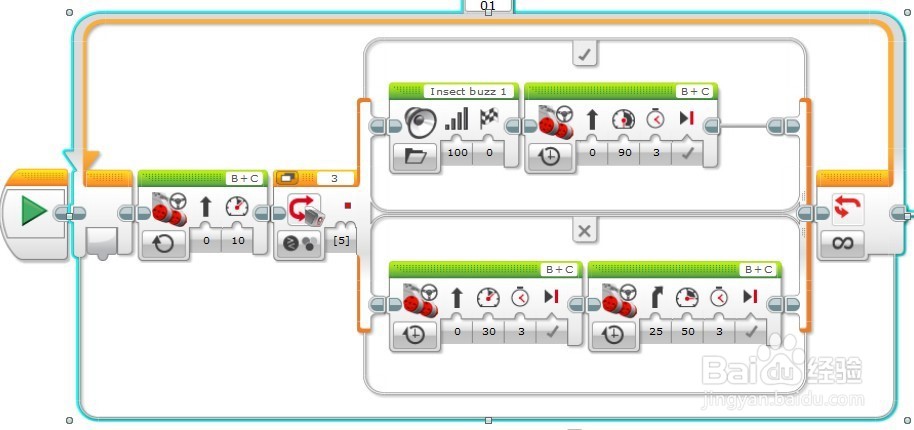
1、我们的斗牛在场地漫步巡逻,检测到红色的东西斗牛会加速前进去攻击。而看到非红色的东西会做出后退然后转弯的结果。