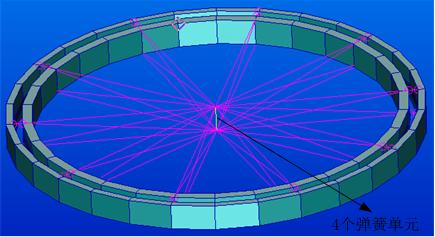
1、轴承存在轴向刚度与侧向刚度,在简化分析时可以采用弹簧单元模拟其平动方向的刚度。轴承模型如图所示。

2、mpc采用RBE建立。建立mpc1与轴承内圈相连,建立mpc2与轴承外圈外圈相连。mpc1与mpc2均约束6个自由度。

3、在mpc1与mpc2的独立节点之间建立mpc3,mpc3释放UX、UY、UZ、RZ。mpc3与mpc1的独立节点相同。建立图中所示的坐标系,坐标系Z与轴承中心线重合,并修改mpc1与mpc2的独立节点的分析坐标系为图中所示坐标系。

4、在mpc1与mpc2的独立节点之间建立4个弹簧,分别用来模拟UX、UY、UZ、RZ三个方向的平动自由度和轴承转动方向的自由度(为了能进行静力学分析,RZ需要人为设置刚度)。
5、UX方向刚度为1e8N/m,UY方向刚度为2e8N/m,UY方向刚度为3e8N/m,RZ方向的刚度为9e4N.m/rad。UX方向的弹簧刚度设置如图所示。弹簧的刚度与弹簧单元的2个节点的分析坐标系有关。(注意:弹簧的刚度不是相对于“属性框中User Def CS number定义的坐标系”,因此设置User Def CS number对弹簧的刚度无影响))

6、约束轴承外圈并对mpc1独立节点上分别施加三个方向的力(力的大小均为1e6N),约束模型如图所示。

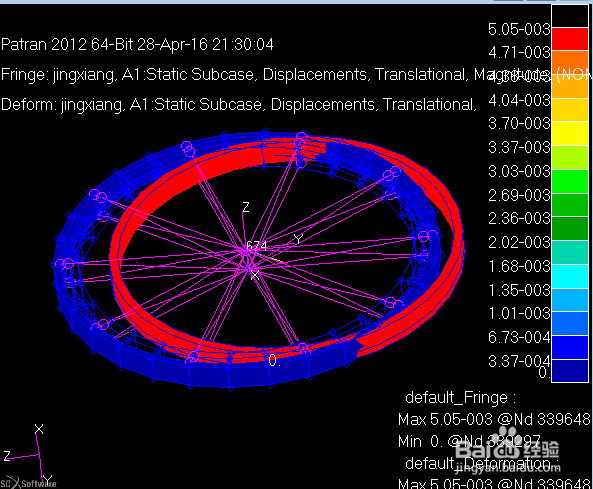
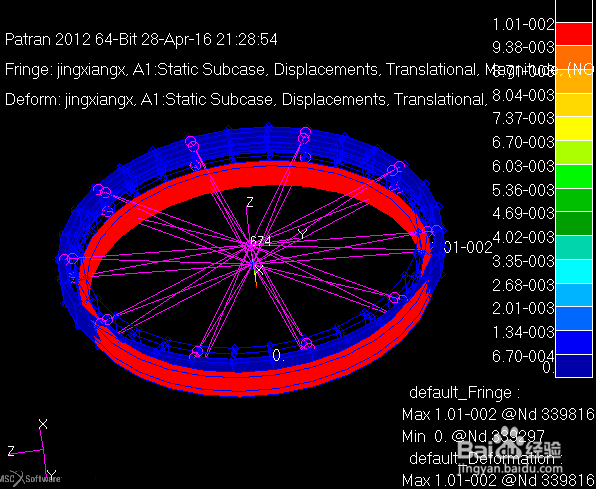
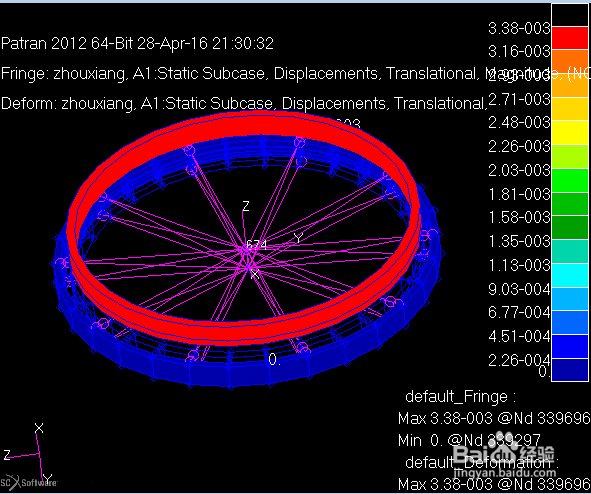
7、三个方向的变形如图所示。理论计算轴承内圈在X、Y、Z三个方向的变形分别为1e-2m,5e-3m,3.33e-3m。仿真结果偏大是因为轴承内圈本身的刚度造成总体刚度减小。