1、在matlab命令窗口键入:
rosinit
按enter键,如下图所示。

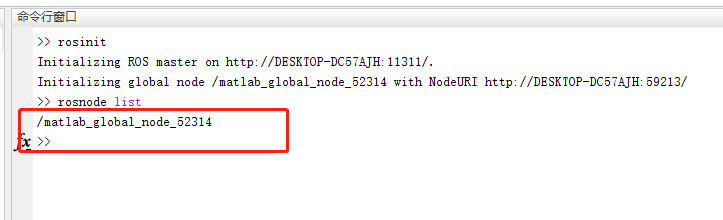
2、使用rosnode列表查看ROS网络中的所有节点。请注意,唯一可用的节点是由rosinit创建的全局节点。
在matlab命令窗口键入:
rosnode list
如下图所示。
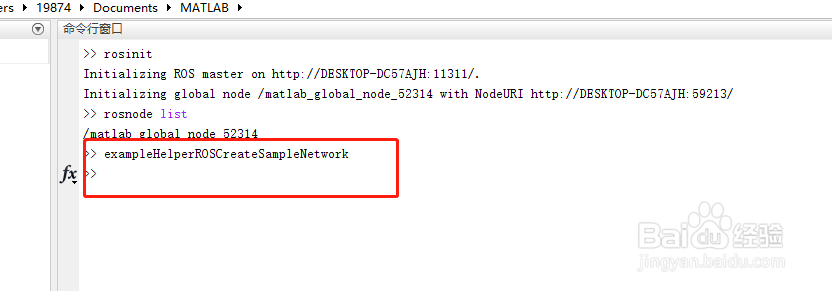
3、使用examplehelperroscreatesamplenetwork在ROS网络中添加三个附加节点以及示例发布者和订阅者。
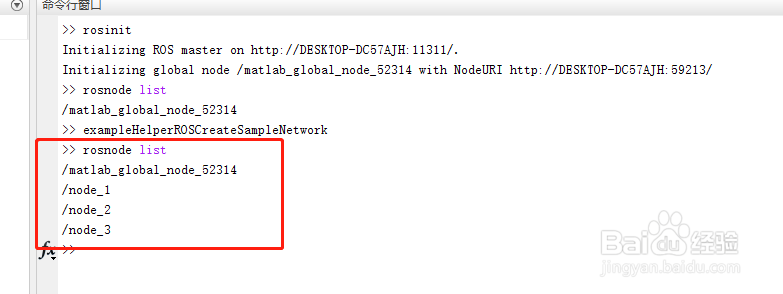
4、再次使用rosnode list,并观察到有三个新节点(节点1、节点2和节点3)。
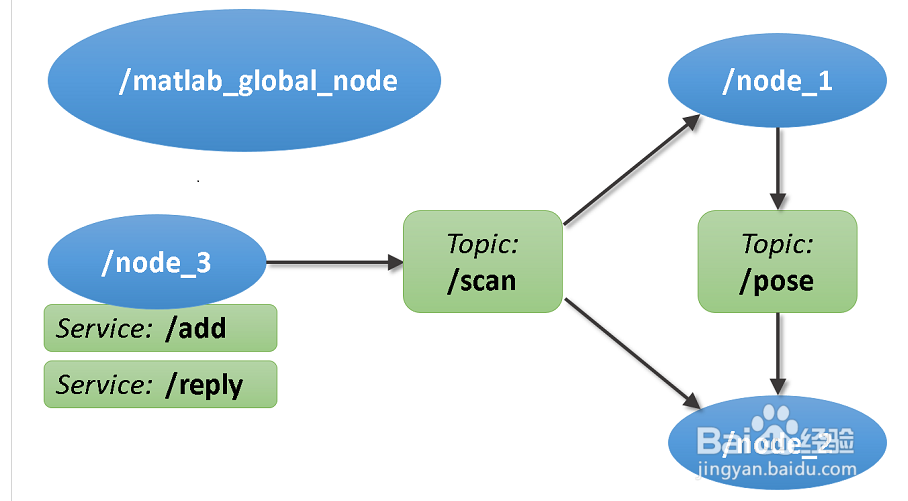
5、ROS网络当前状态的可视化表示如下所示。
MATLAB全局节点已断开连接,因为它当前没有任何发布者、订阅者或服务。