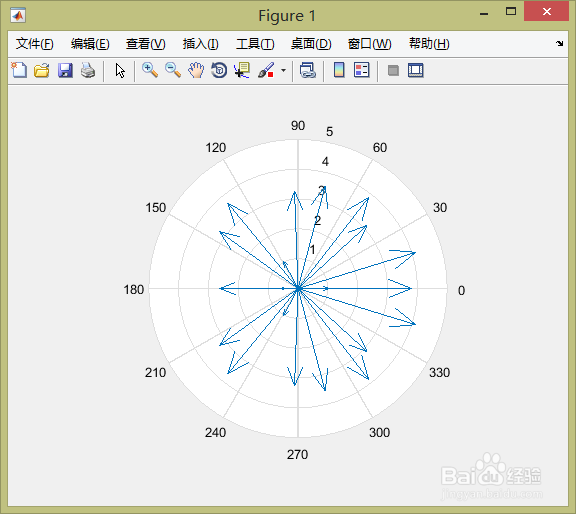
1、罗盘图
罗盘图是从原点出发的箭头表示方向和速度矢量
例如
z=eig(randn(20,20));
compass(z)
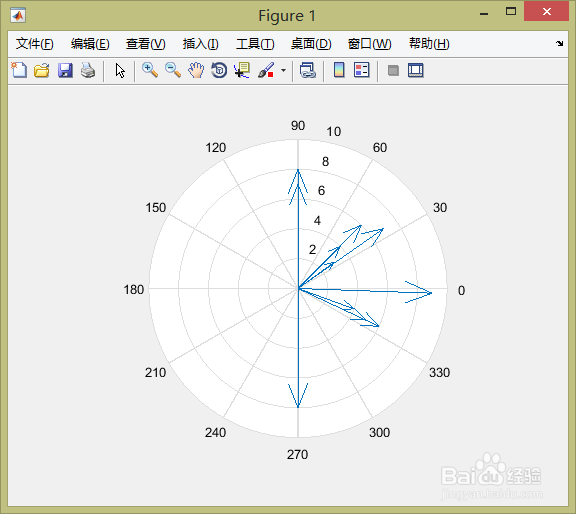
2、描绘12小时周期内的风向和风力的罗盘图
a=[45 90 90 45 36 335 35 270 358 340 335];
b=[6 7 8 4 3 5 7 8 9 4 6];
r=a*pi/180;%将风向角度转为弧度
[x,y]=pol2cart(r,b);
compass(x,y)
3、绘制羽毛状图
羽毛状图显示源于水平轴上等距的向量
t=0:0.5:10;%时间范围
s=0.05+i;%螺旋速率;
z=exp(-s*t);%计算延迟指数
feather(z)

4、二维箭头图
quiver函数用于二维箭头图,其箭头显示图上各点向量的大小和方向,其中,箭头指向的方向为箭头方向,箭头长短代表向量大小
t=0:0.5:10;%时间范围
s=0.05+i;%螺旋速率;
z=exp(-s*t);%计算延迟指数
feather(z)
n=-2.0:0.2:2.0;
[x,y,z]=peaks(n);
contour(x,y,z,10)
[u,v]=gradient(z,0.2);
hold on
quiver(x,y,u,v)
hold off

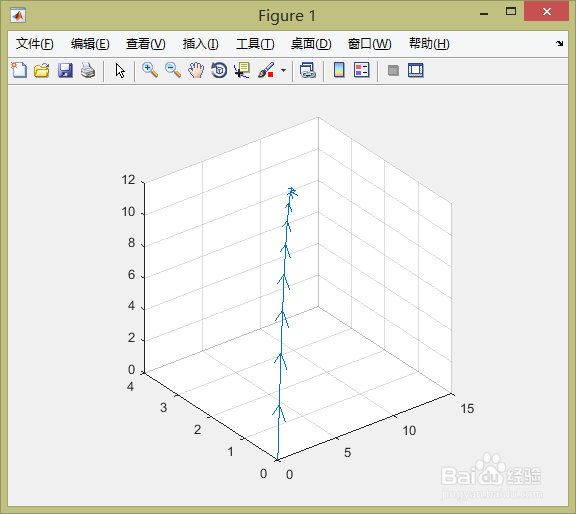
5、三维箭头图
vz=30;
a=-40;%加速度
t=0:0.1:1;
z=vz*t+1/2*a*t.^2;
vx=10;
x=vx*t;
vy=3;
y=vy*t;
u=gradient(x);
v=gradient(y);
w=gradient(z);
scale=0;
quiver3(x,y,z,u,v,w,scale)
axis square