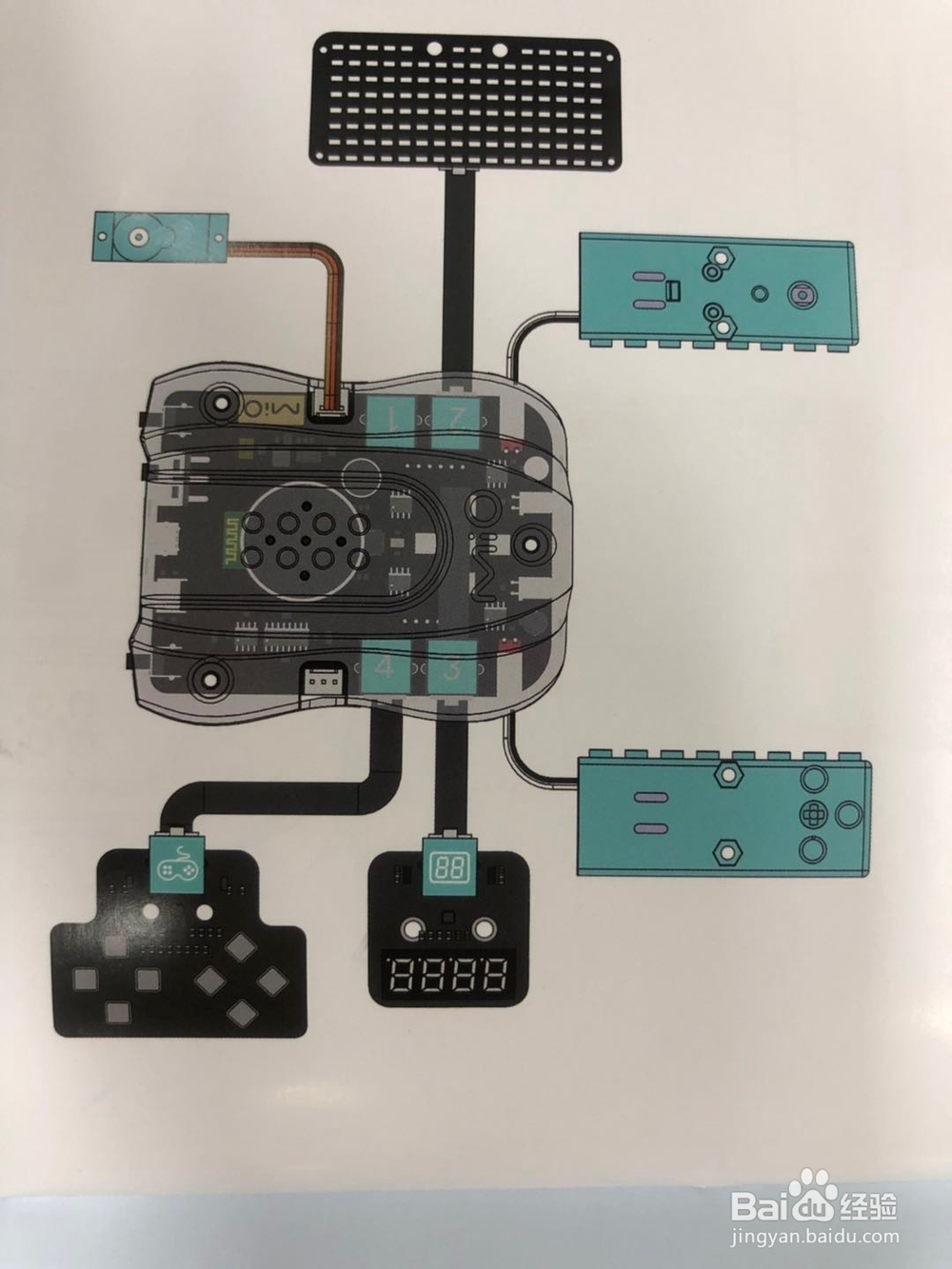
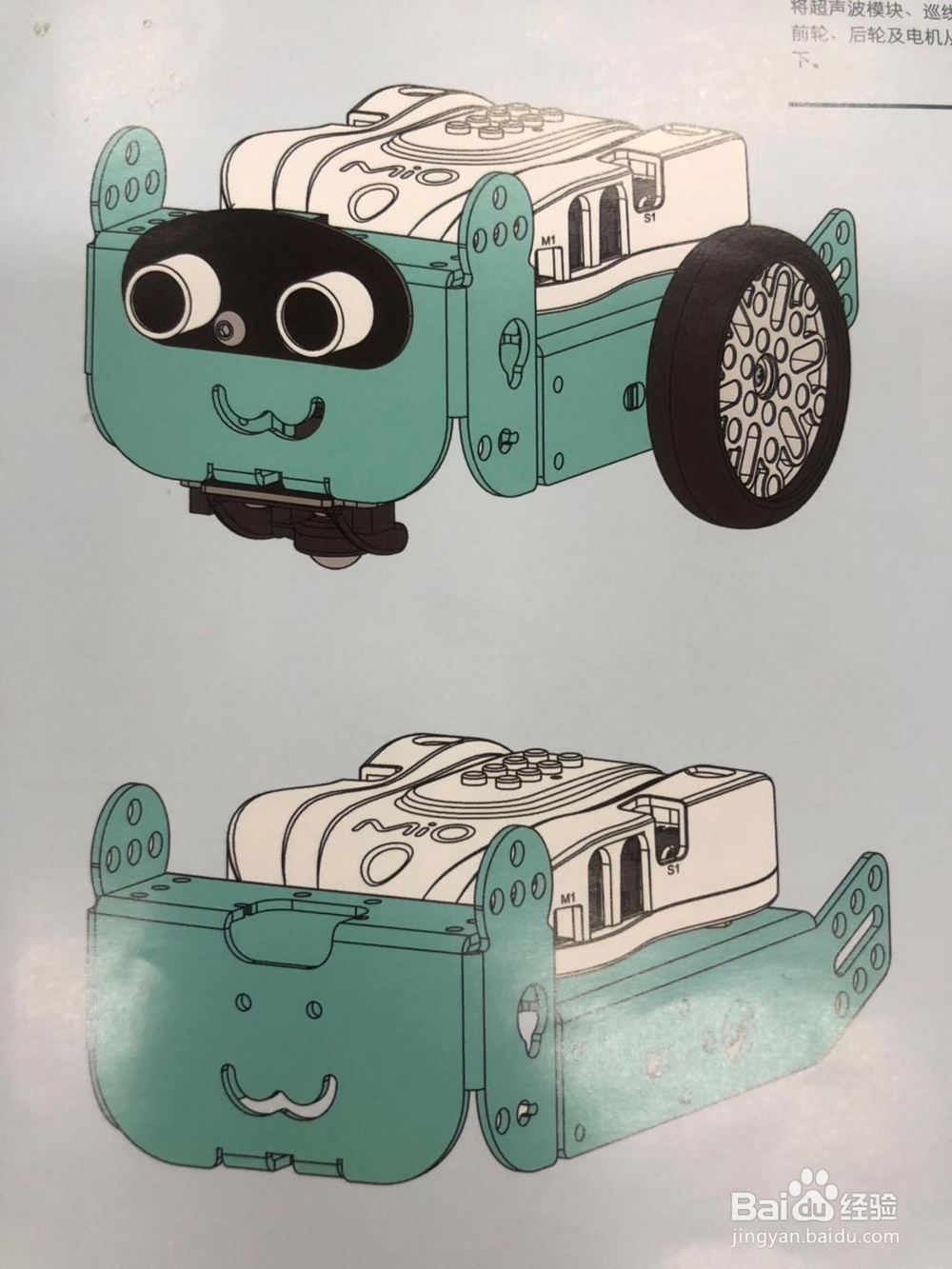
1、将mio机器人主体自带的超声波模块、巡线模块、前轮、后轮及电车,从车体取下。
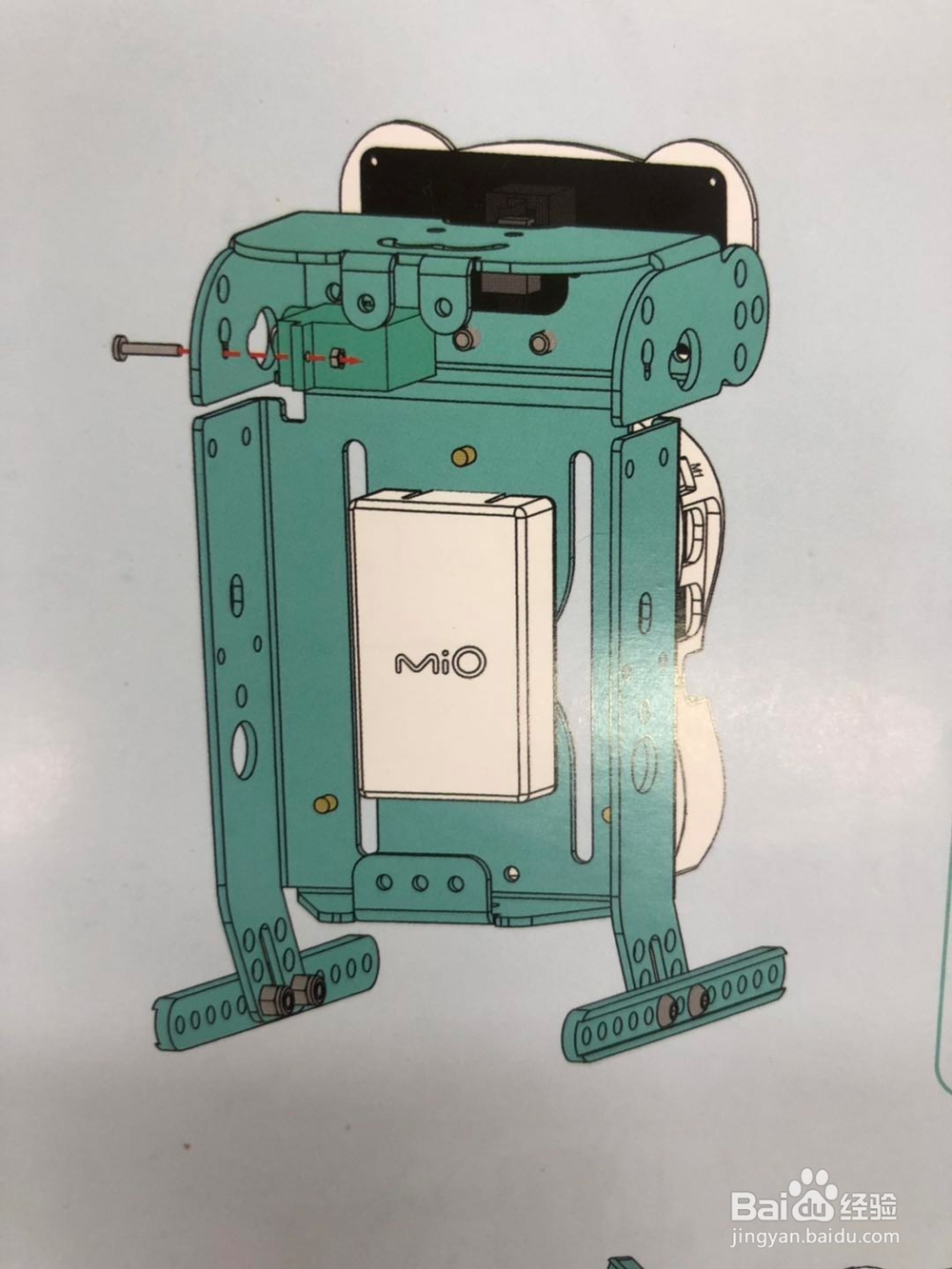
2、安装底座。使用M4*10mm 螺丝4颗、M4自紧螺母*4分别将2个13孔铝件固定在机器人左右两侧下方,如图所示:

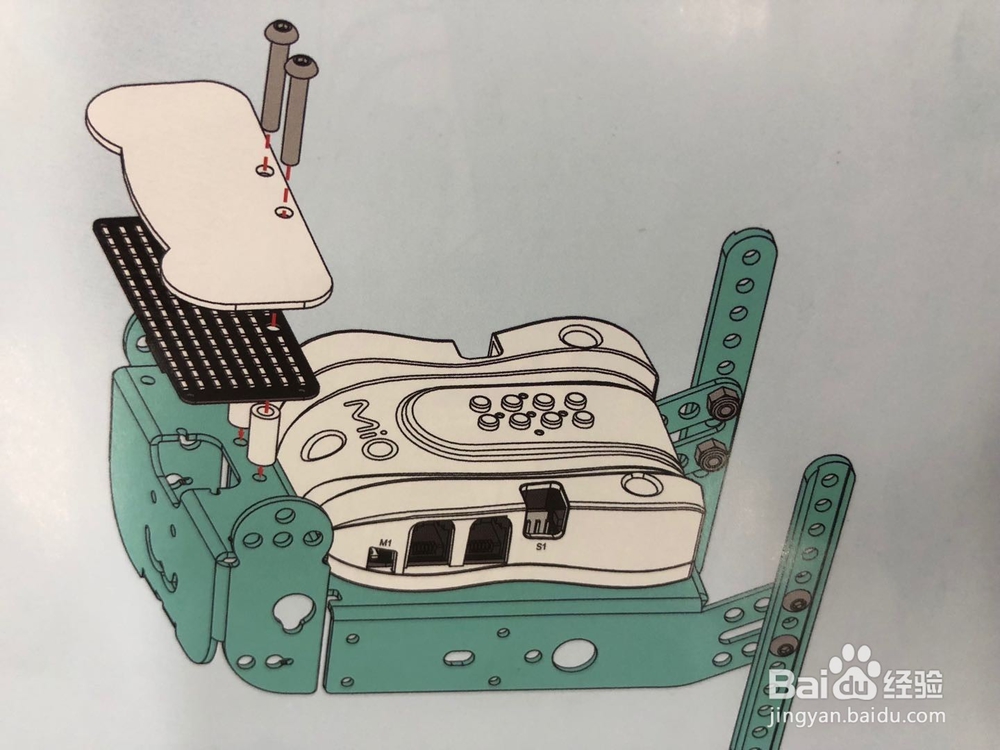
3、安装表情面板。
使用标准包中的表情面板、LED点阵模块用M4*25mm螺丝和2个15mm垫片固定在机器人上方头部,如图所示:
4、安装舵机。
使用M2*12mm的螺丝与M2的螺母将舵机固定在机器人背面,如图所示:
5、使用2个M2.3*8mm的螺丝与1个12孔铝件将舵机舵盘固定在机器人一侧,如图所示:

6、安装固定支架。
使用M4*10mm螺丝将单排4孔铝件固定,如图所示:

7、安装数码管模块。
使用2个M4*10mm螺丝将数码管模块固定在支架上,如图所示:

8、安装多按键模块