1、定义输裕始匠入为2*4维的P,目标为T。

2、初始化参数W和b,使得W*P+b=0直线进行正确分类。

3、将b转为S*Q的矩阵B,求得初始参数下的输出A。
4、画出[-2 2][-2 2]大小的坐标系下的输入点的坐标。

5、画出初始化Wb下的分割线,并判断训练是否结束(A=T时结束)。
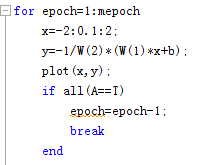
6、计算误差,并求得修正值进行修正,棍夏及修正后的权值的分割线肥此。

7、画出实现正确分类的Wb的分割线。

8、例图如图,由于初始参数随机性,训练轮数不一。

1、定义输裕始匠入为2*4维的P,目标为T。
2、初始化参数W和b,使得W*P+b=0直线进行正确分类。
3、将b转为S*Q的矩阵B,求得初始参数下的输出A。
4、画出[-2 2][-2 2]大小的坐标系下的输入点的坐标。
5、画出初始化Wb下的分割线,并判断训练是否结束(A=T时结束)。
6、计算误差,并求得修正值进行修正,棍夏及修正后的权值的分割线肥此。
7、画出实现正确分类的Wb的分割线。
8、例图如图,由于初始参数随机性,训练轮数不一。