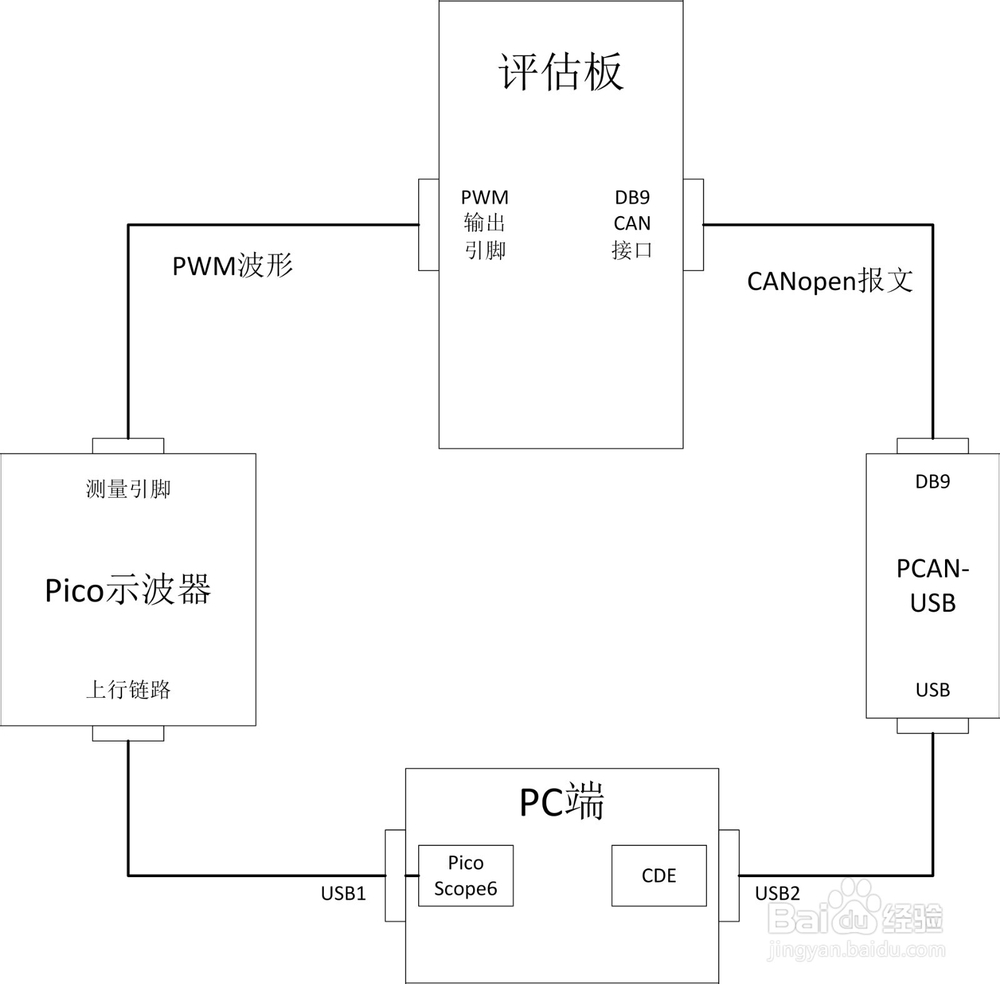
1、测试平台框架如下图所示,PC端通过PCAN-USB设备连接到评估板;PC端CDE软件加载CO4017芯片的EDS文件之后可以直接发送CANopen报文,控制CANopen芯片产生特定频率和占空比的PWM波形;示波器则可以采集该PWM波形,并在PC端软件上显示出来。
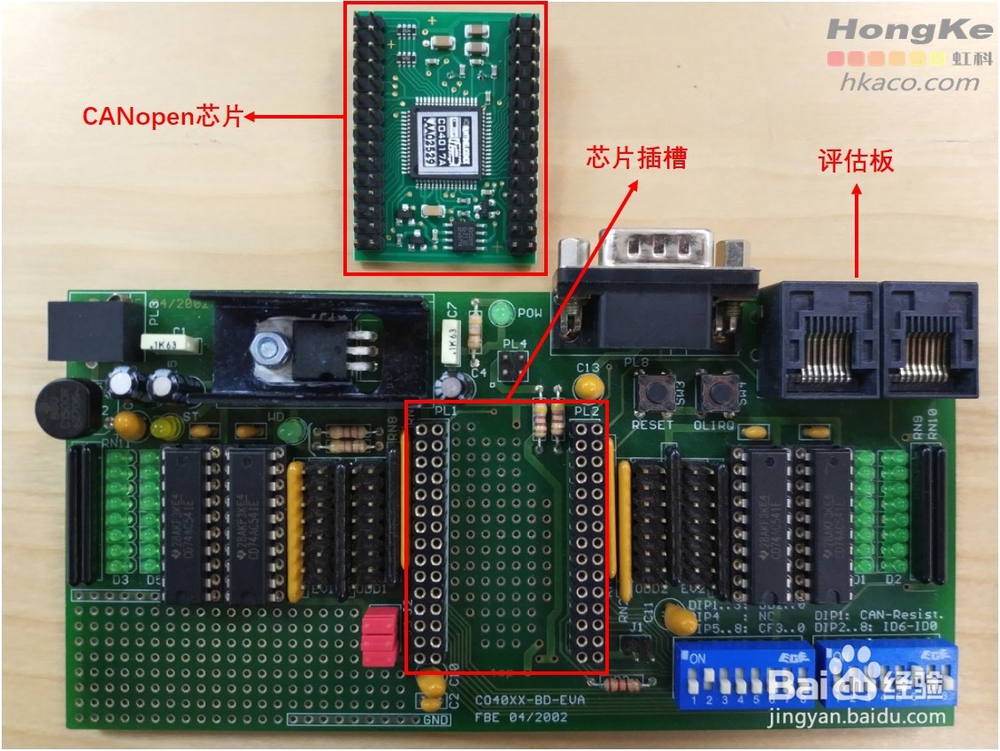
2、将CO4017芯片插到EVA评估板的插槽当中,如下图所示,注意引脚的顺序,可以参考简介中的产品示意图。除此之外,评估板上还分布了4组输出引脚和4组LED灯,我们可以直接通过这些引脚输入/输出电平,也可以通过LED灯观察是否有实际输出。
3、上电前通过拨码开关设置芯片的波特率和节点ID。评估板上设置有2组拨码开关,其中第1组的前3位为设置CANopen的波特率;第2组的第1位为使能CAN终端电阻,后7位为设置CANopen的节点ID。这里我们设置的波特率500kbit/s,节点ID为4,如下图所示Q-2861917479。

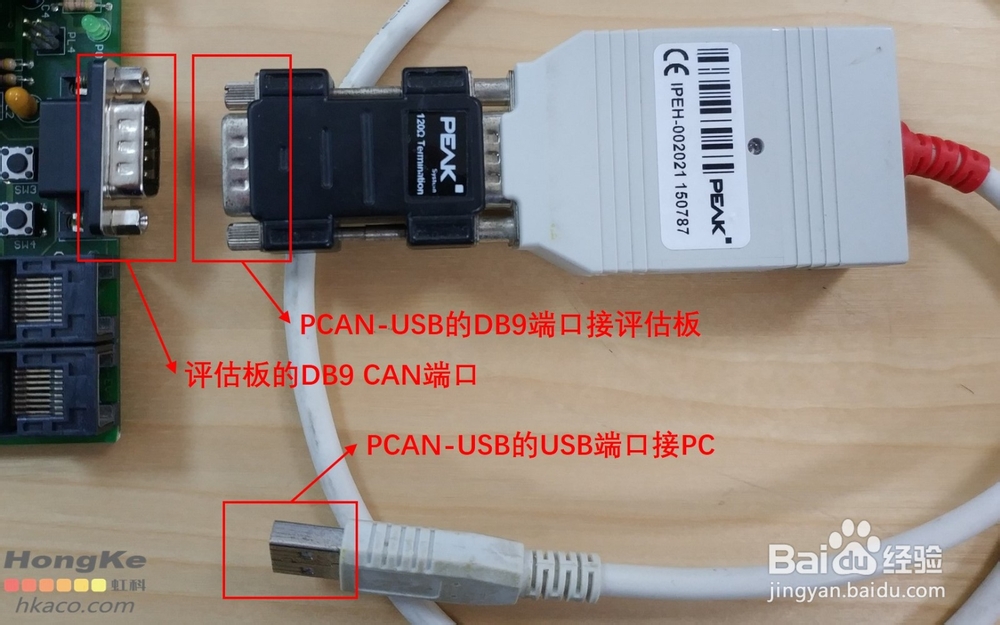
4、通过PCAN-USB把开发板的CAN口连接到PC端,其中开发板上的CAN端是DB9接头,连接到PCAN-USB的DB9接头;PCAN-USB的USB端连接到电脑上。
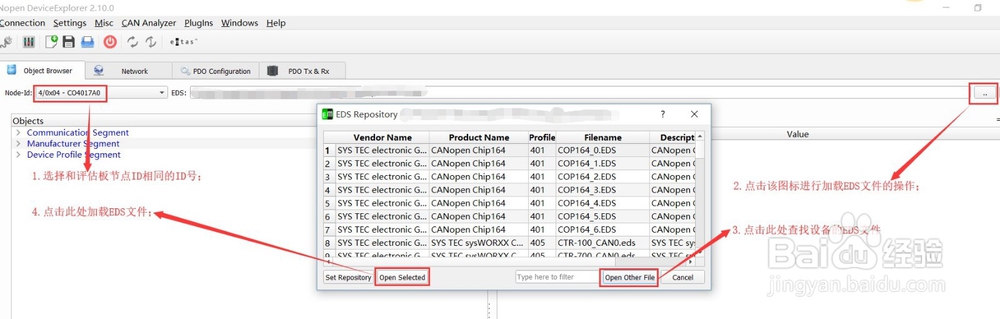
5、在CDE软件中加载CO4017芯片的EDS文件,步骤如下图所示。EDS文件是CANopen的设备描述文件,包含一个CANopen从站的所有对象条目,用户可以通过这个EDS文件来了解这个产品的功能和操作方法;同时它也可以用于CANopen配置软件的组态功能(比如我们这里使用的CDE软件)。
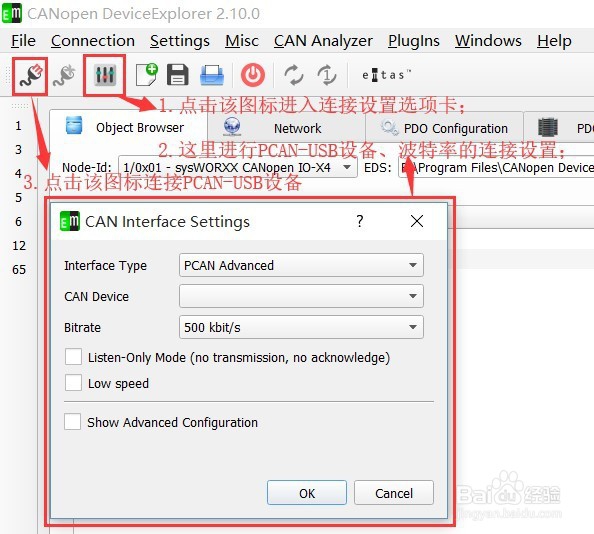
6、设置连接选项,连接到PCAN-USB设备,步骤如下图所示。
7、评估板上电,此时可以在CDE软件端收到CANopen芯片发出的Boot-Up报文,表示该设备已经能够正常运行。

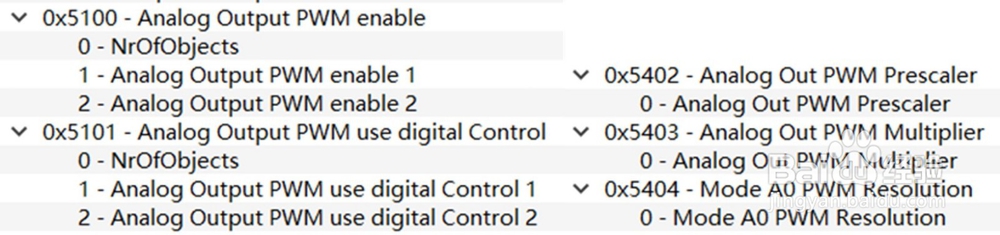
8、通过SDO配置CO4017芯片,主要是配置CANopen的通讯参数和PWM波形参数。这里我们使用默认通讯参数;PWN波形参数主要涉及到图3.7中的几个对象条目,对象0x5100设置使能模拟输出引脚输出PWM波形,0x5101设置使用数字输出的对象条目控制PWM输出的开和关,0x5402控制PWM分频系数,0x5403控制PWM的倍频系数(0x5402和0x5403共同可以从芯片的基频获得PWM的频率),0x5404设置PWM波形的分辨率(涉及的后面占空比是设置)。这几项参数可以通过CANopen的SDO服务来进行设置。
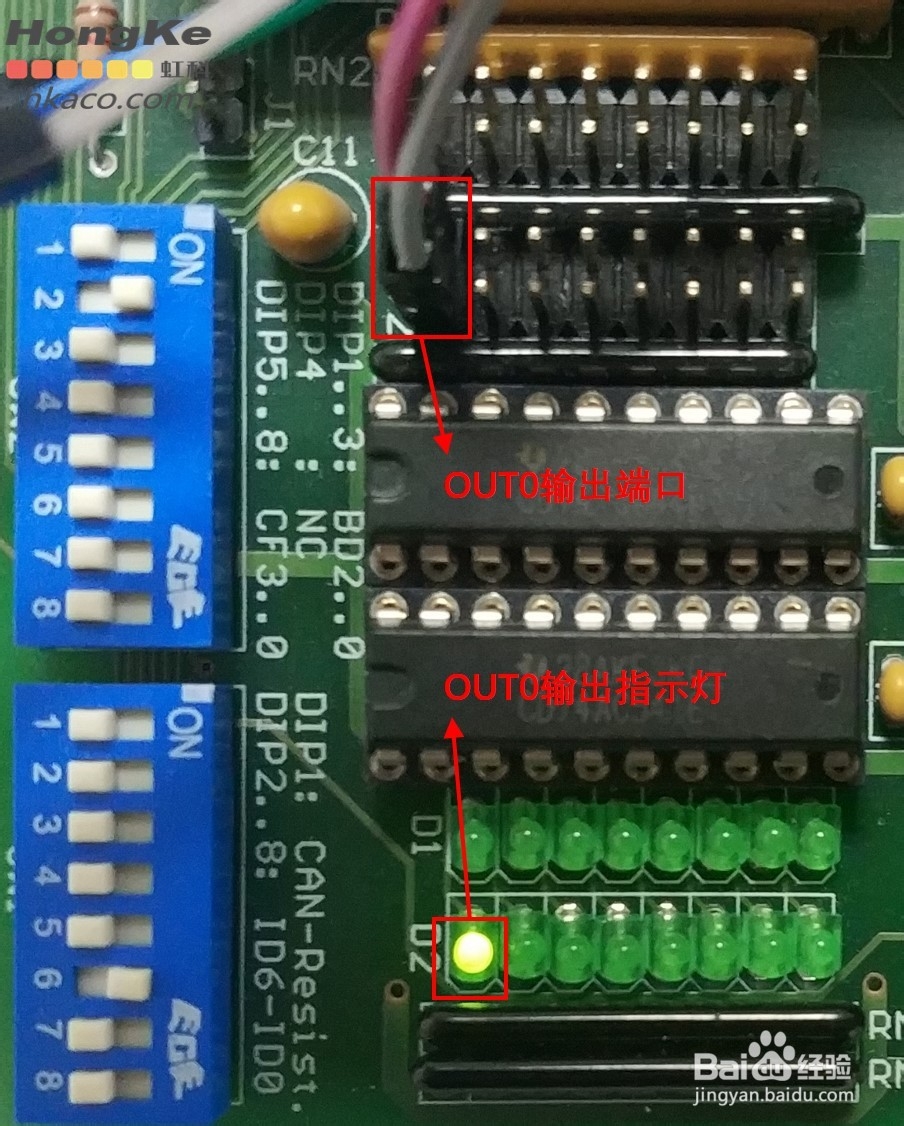
9、发送“Start-Up”报文配置设备进入OP状态,进入OP状态之后就可以尝试通过PDO来控制输出端口产生PWM波形。查询产品的EDS文件后确认需要发送下列PDO报文,前者控制PWM输出端口开启,后者控制PWM波形的占空比。PDO发送完成之后可观察到设备的OUT0输出指示灯亮起,此时可以通过示波器在相应的引脚测得相应的波形。

10、实际测试得到的PWM波形如下图所示,因为该芯片的输出引脚默认输出为高电平,所以实际我们设置的占空比为10%、20%和30%;频率主要是0x5402和0x5403这两个对象条目来设置的,此处可以参考手册来计算。
