1、第12关:
这一关还是考验我们如何运用“检查路点距离”这条指令。经过几次运行之后我们可以发现,左上角和右上角的两名敌方“士兵”是不会主动移动的,只有我们进入它们的视野才会来攻击我们,所以我们只需要和它们保持一定距离就可以。
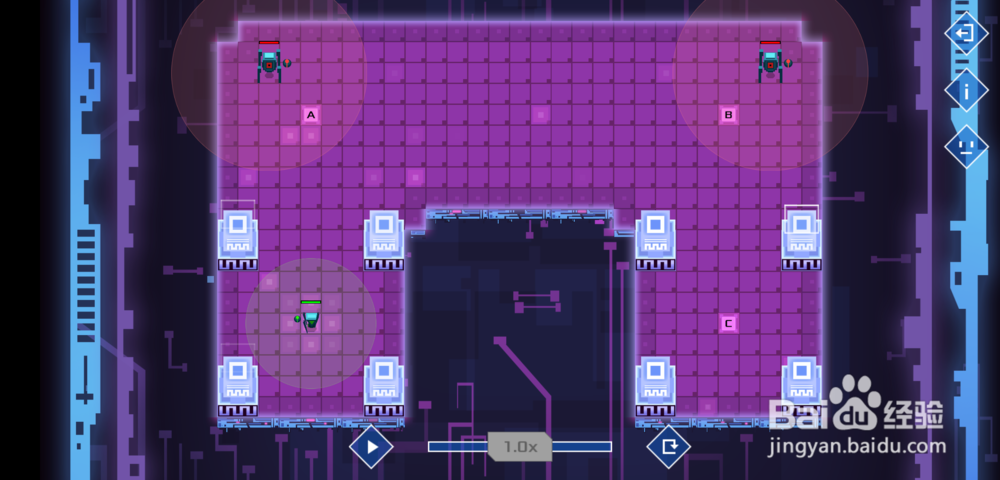
2、我们可以通过检测与AB两点的距离来大致判断与敌方的距离,所以我们用“检查路点距离”这条指令先检查与AB两点的距离,如果到达一定境界范围则让我们的小机器人避开或者相别处移动,这是我们则需要“信号”命令的帮助了。

3、第一行代码:设置移动模式“路点A”
第二行代码:设置条件“检查路点距离A≤3”,设置“信号1开”
第三行代码:设置条件“检查信号1”,设置移动模式“路点B”
第四行代码:设置条件“检查路点距离B≤3”,设置“信号2开”
第五行代码:设置条件“检查信号2”,设置移动模式“路点C”

4、这样一来,我们的小机器人就像学会了自动寻路一样能够避开敌人快速前往C点了。
