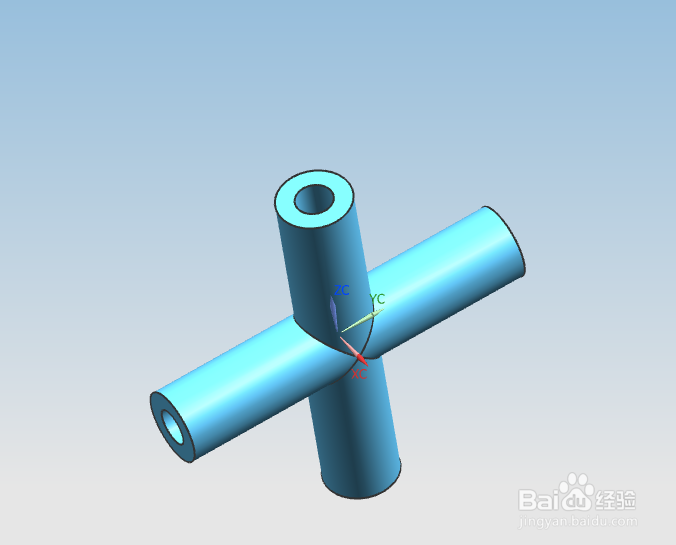
1、启动UG10.0后,绘制如图的十字交叉连杆;(可以使用拉伸功能创建交错的两个圆柱,然后进行布尔运算)
2、通过NX10.0启动栏,切换到装配模式下,然后装配如下图的零件;(在进行零件装配的时候,可以使用移动或约束等类型)

3、从UG装配中切换到运动仿真模块,然后新建一个机构运动仿真;(必须新建一个仿真运动,其仿真模块中的命令才可以使用)

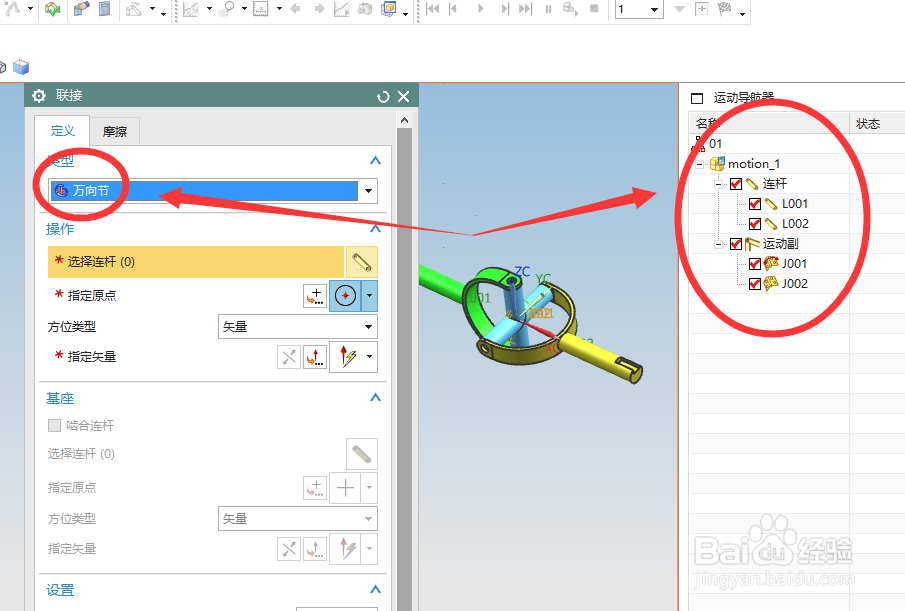
4、按下图右侧的导航栏创建连杆后,然后增加万向节;
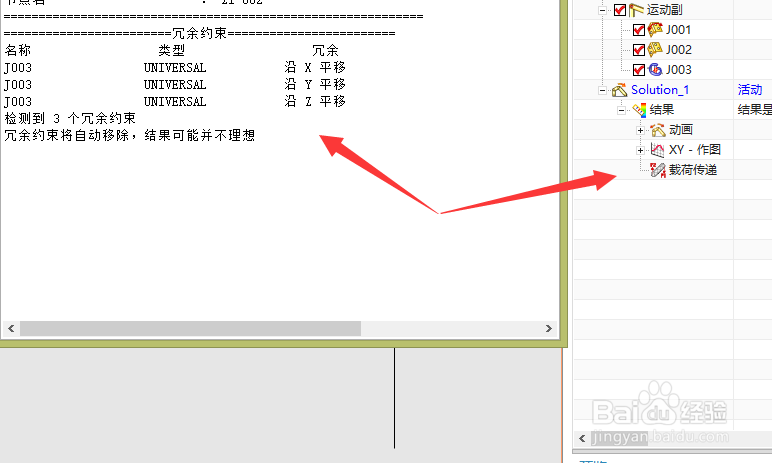
5、通过对创建的机构进入解算,然显示的基本信息如下图;
6、在NX11.0运动仿真下通过动画播放,我们所创建的万向节运动仿真机构就完成了。
