1、新建变量,代表速度和距离
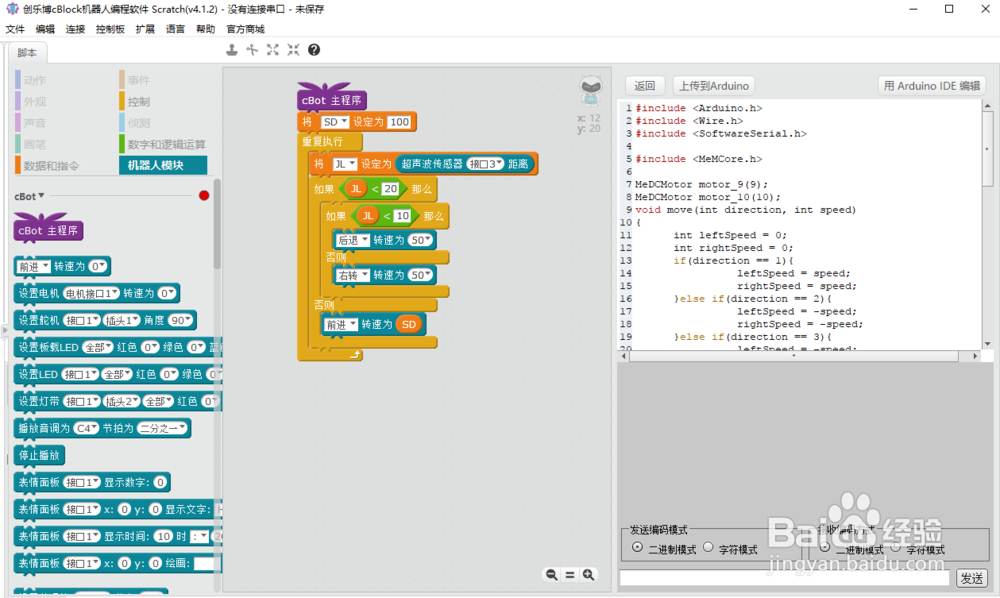
2、将速度设置为100
3、设定距离是超声波传感器的测试距离
4、如果距离大于或等于20,小车前进
5、如果距离小于10小车后退,速度为50
6、如果距离在10到20之间,则向右转
7、添加延迟效果