1、首先需要将旋转传感器测量端安装在天车卷筒上,如下图所示位置,需要把测量端固定稳固,防止掉落发生。


2、接着需要就近安装上旋转传感器的无线接收端,无线接收端用于接收测量端发出的测量数据,无线接收端采用有线供电,接收距离无遮挡10米,安装的时候需要让测量端和接收端处于有效的数据通信范围内。


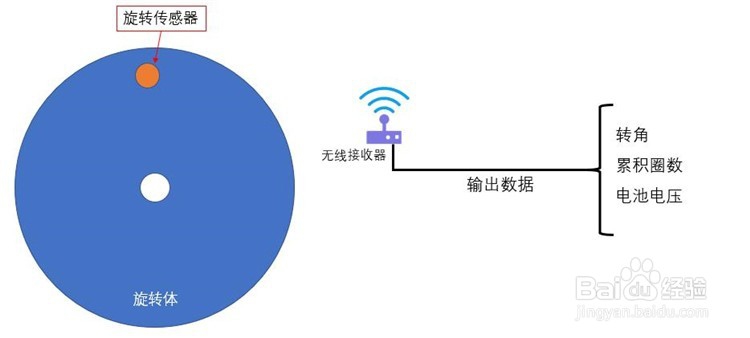
3、最后简单说下旋转传感器的测距原理,旋转传感器和旋转体安装在一起同旋转体一起旋转,将旋转角度数据通过无线传输模式将数据传输给无线接收器,无线接收器再通过RS-485总线/Modbus协议将数据传输到服务器或者PLC。
旋转传感器采用捷联惯导(SINS)技术,由三轴陀螺仪、三轴加速度计、嵌入式计算机、无线数传系统、供电系统组成。传感器固定安装在旋转体(车轮)上,六轴传感数据通过嵌入式计算机解算出姿态角、累积旋转角并通过无线数传系统外传至接收器。
1:旋转传感器与轮体无须同轴安装,可以紧固安装在轮体任意位置,保持安装面垂直于地面;
2:旋转传感器系统通过RS-485接口连接,遵循Modbus-RTU协议, 数据更新频率可达100Hz;
3:旋转传感器角度精度0.1度。
4:旋转传感器采用电池供电,可以连续工作6个月。
轨道位移与累积转角计算方法:D=C*N,其中,D:轨道位移,C:运动轮周长,N:累积圈数。在运动轮不确定周长的情况下,可以通过 测量轨道位移和累积圈数的方法,反算周长,累积圈数越多,反算结果越准确。