1、分析结构特性,将相同运动特征工件预置于相同图层,方便后期连杆创建。
本机构,按运动特性,我分为了机架/丝杠/移动架/油缸筒/缸杆/翻转架六部分。(要点:相同运动特性同连杆、左右油缸特性相同,设为同一个连杆)



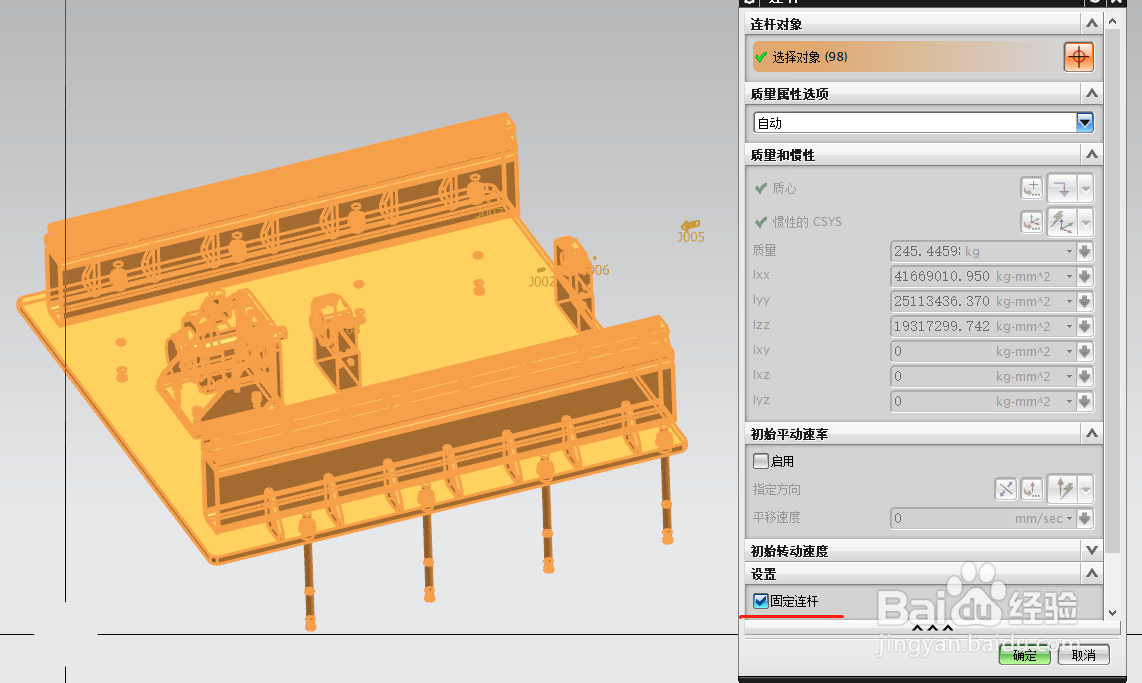
2、进入仿真运动环境 按照提前预置的图层分别将六部分设置成六个独立的连杆。其中机架设置为固定连杆。

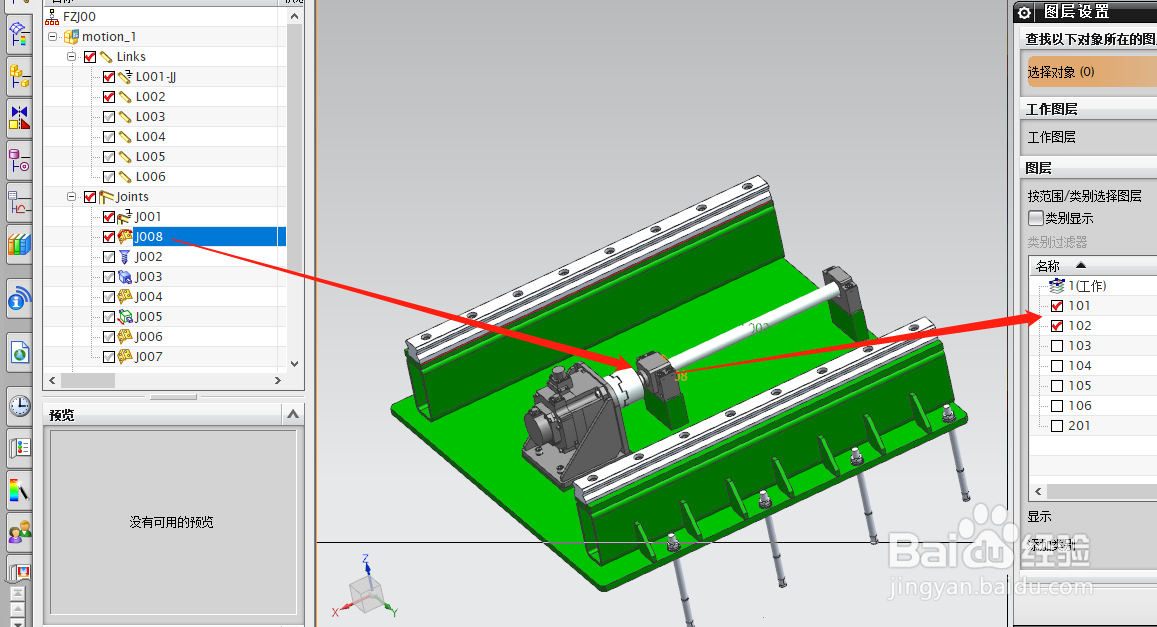
3、从机架开始,依各连杆件的接触运动方式,依次设置各个运动副——旋转副/滑动副/螺旋副/旋转副/滑动副/旋转副/旋转副(注:本处螺杆与滑架间的螺旋副比率设置为3,注意保证啮合连杆的位置和矢量相同)






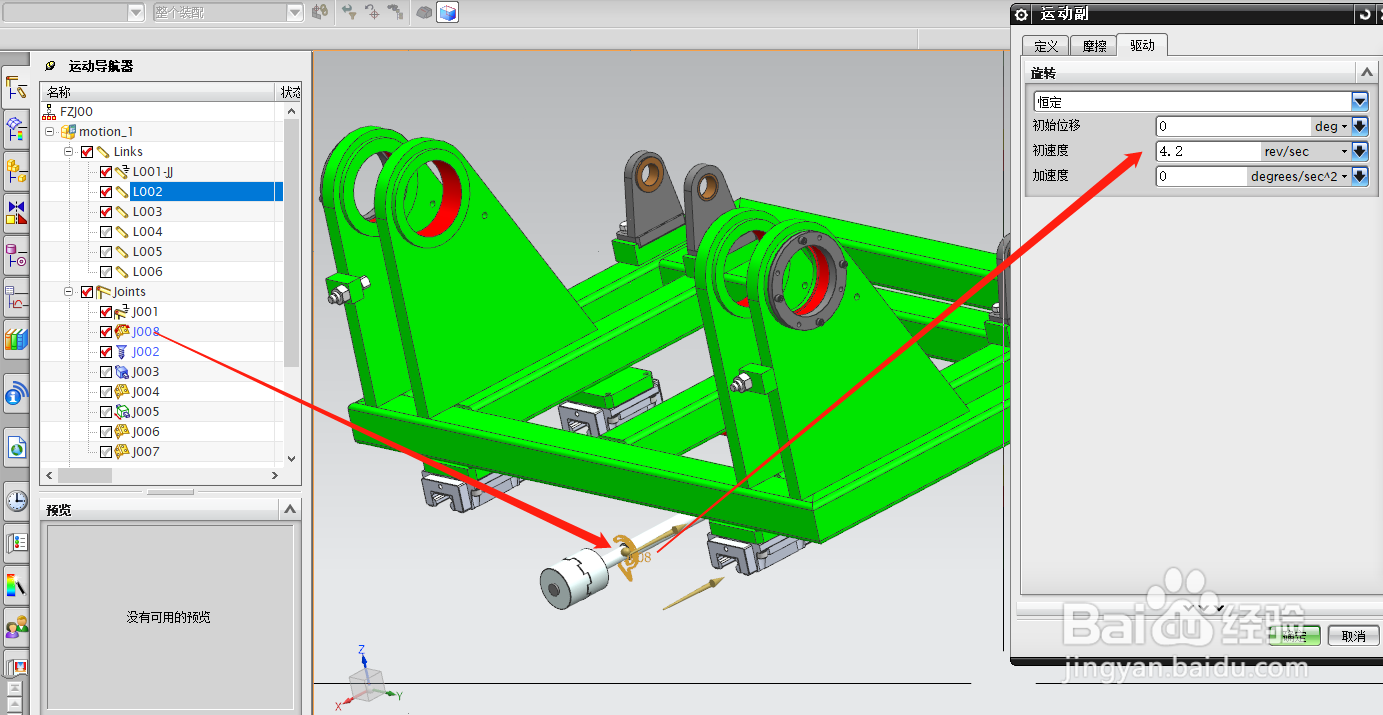
4、设置运动参数和解算条件(螺杆恒转速4.2转/s 油缸速度20mm/s 模拟时长24s)


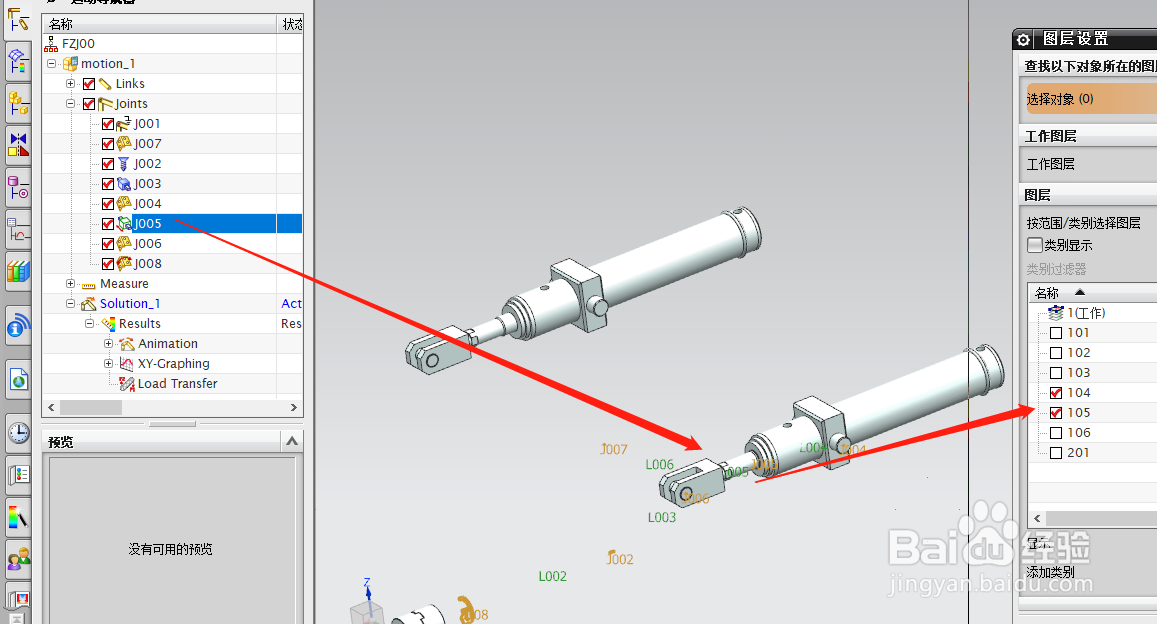
5、解算并分析运动结果(依需可增加测量位置,测量丝杠和油缸的变化等)
