1、首先,下载并安装(编译)pointcloud_to_laserscan。具体命令为
~$ mkdir catkin_wspointcloud_to_laserscan
~$ cd catkin_wspointcloud_to_laserscan
~$ wstool init src
~$ cd src
~$ git clone https://github.com/ros-perception/pointcloud_to_laserscan
~$ cd ..
~$ catkin_make
~$ source ~/.bashrc
在catkin_wspointcloud_to_laserscan文件夹下将得到如图所示三个文件。
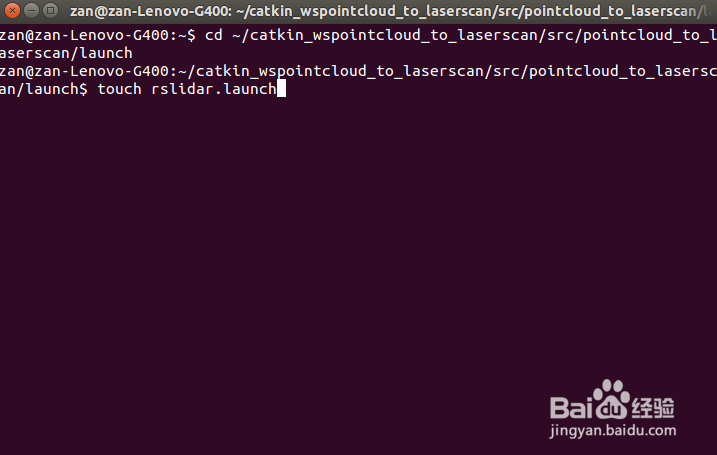
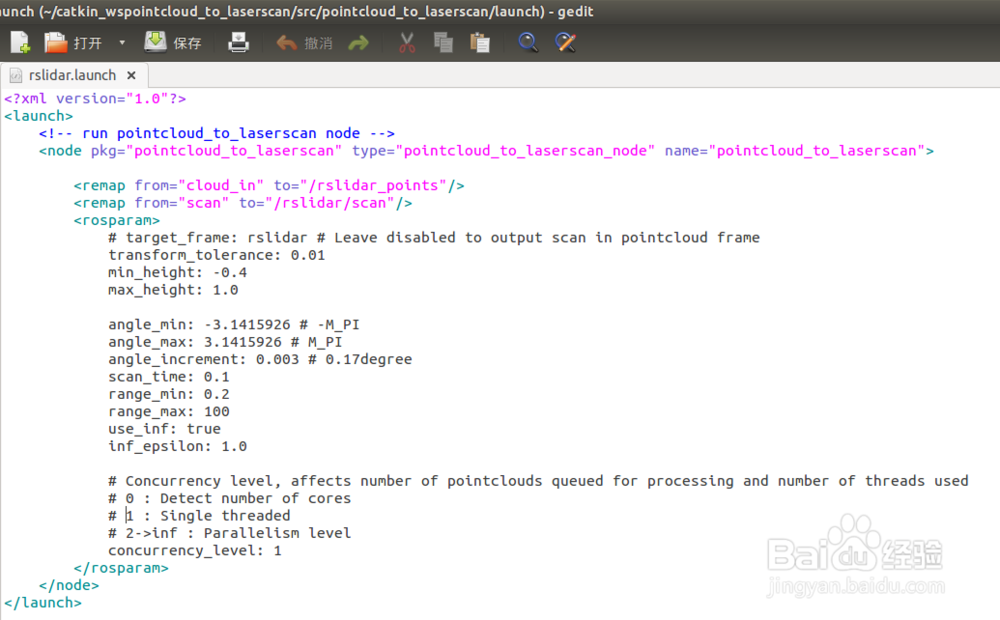
2、然后,切换到目录cd ~/catkin_wspointcloud_to_laserscan/src/pointcloud_to_laserscan/launch,新建一个文件touch rslidar.launch,并用gedit编辑其内容如下:
<?xml version="1.0"?>
<launch>
<!-- run pointcloud_to_laserscan node -->
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="/rslidar_points"/>
<remap from="scan" to="/rslidar/scan"/>
<rosparam>
# target_frame: rslidar # Leave disabled to output scan in pointcloud frame
transform_tolerance: 0.01
min_height: -0.4
max_height: 1.0
angle_min: -3.1415926 # -M_PI
angle_max: 3.1415926 # M_PI
angle_increment: 0.003 # 0.17degree
scan_time: 0.1
range_min: 0.2
range_max: 100
use_inf: true
inf_epsilon: 1.0
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 1
</rosparam>
</node>
</launch>
3、接着,连接好硬件部分,开启雷达,命令如下:
~$ cd ~/catkin_wsrslidar
~$ source devel/setup.bash
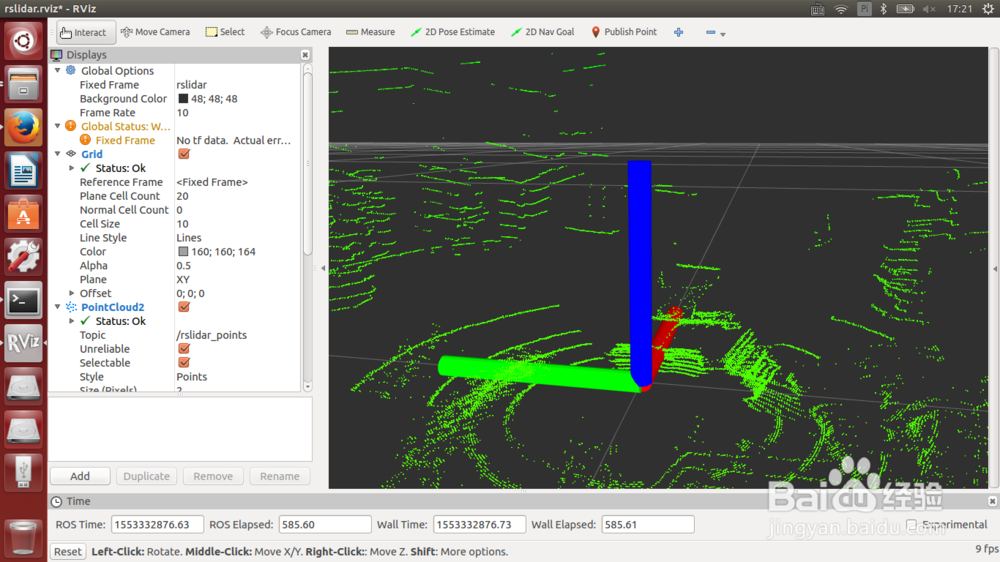
~$ roslaunch rslidar_pointcloud rs_lidar_16.launch

4、最后,用Ctrl+Shift+T命令打开新的终端,启动点云3D数据转换:
~$ cd catkin_wspointcloud_to_laserscan/src/pointcloud_to_laserscan/launch
~$ roslaunch pointcloud_to_laserscan
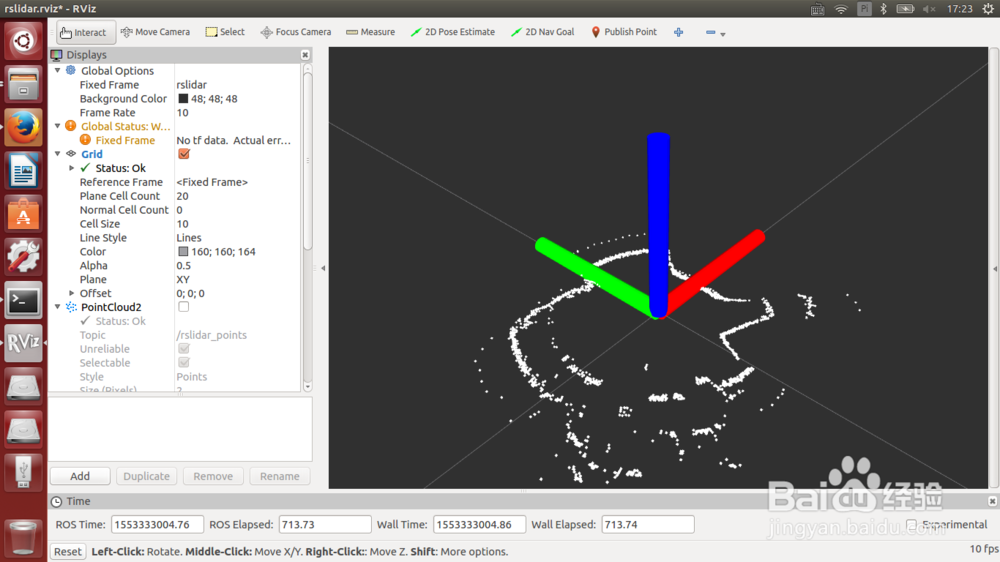
在rviz中去掉pointcloud2后面的勾,并增加topic:/rslida/scan
得到2D结果如图所示。