1、a.点击 test run
b.点击AGREE


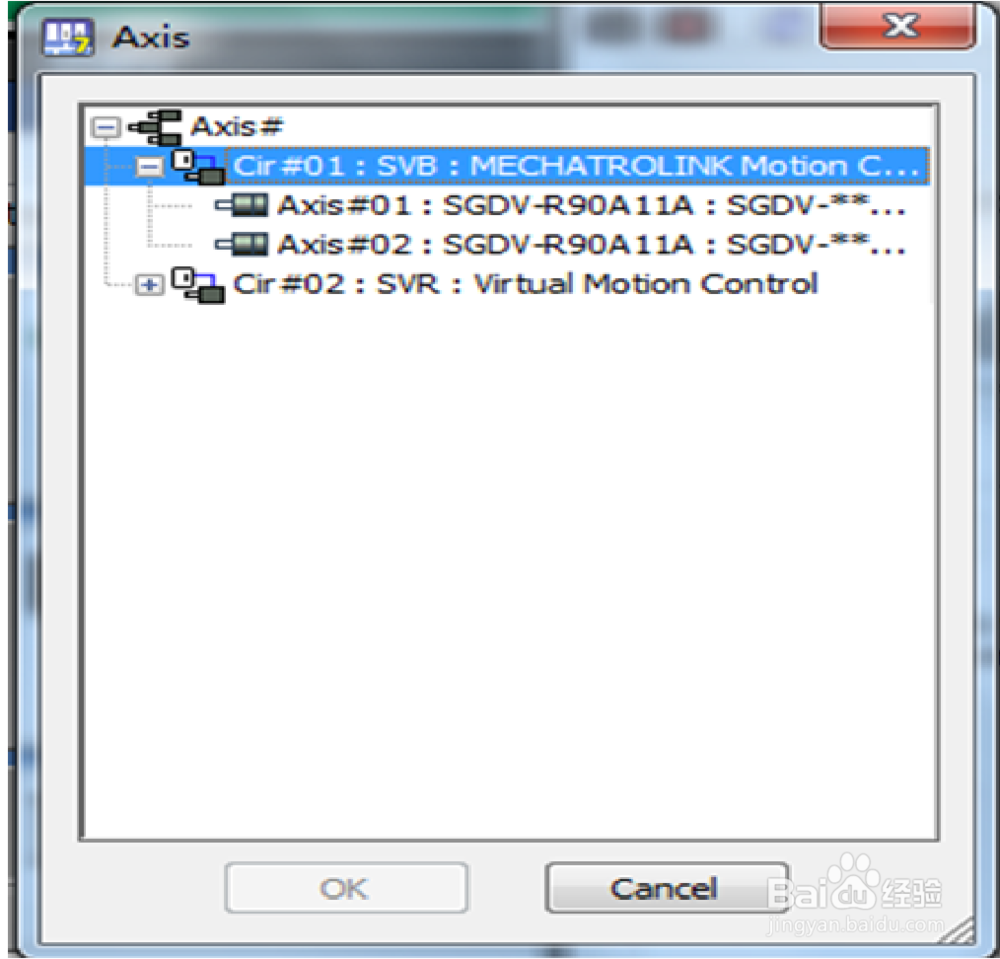
2、a.CIR#01轴中选择要JOG的轴
b.点击是
c.点击enable
d.点击后显示如图四



3、a.设置JOG速度
b.设置完成下图红色框中正反JOG 动作
c.如发现JOG方向相反 退出以上


4、a.打开这个软件 通过伺服放大器软件设置
b.如图二选择,点击OK
c.如图三选择,点击OK



5、a.如图选择,点击OK
b.点击继续


6、a.点击参数编辑
b.PN000 0位修改方向
c.修改完成写入伺服
d.写入room



1、a.点击 test run
b.点击AGREE
2、a.CIR#01轴中选择要JOG的轴
b.点击是
c.点击enable
d.点击后显示如图四
3、a.设置JOG速度
b.设置完成下图红色框中正反JOG 动作
c.如发现JOG方向相反 退出以上
4、a.打开这个软件 通过伺服放大器软件设置
b.如图二选择,点击OK
c.如图三选择,点击OK
5、a.如图选择,点击OK
b.点击继续
6、a.点击参数编辑
b.PN000 0位修改方向
c.修改完成写入伺服
d.写入room