1、创建一个DubinsConnection对象。
dubConnObj = robotics.DubinsConnection;
2、定义开始和目标姿势为[x y]向量。
startPose = [0 0 0];
goalPose = [1 1 pi];
3、计算一个有效的路径段来连接姿态。
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
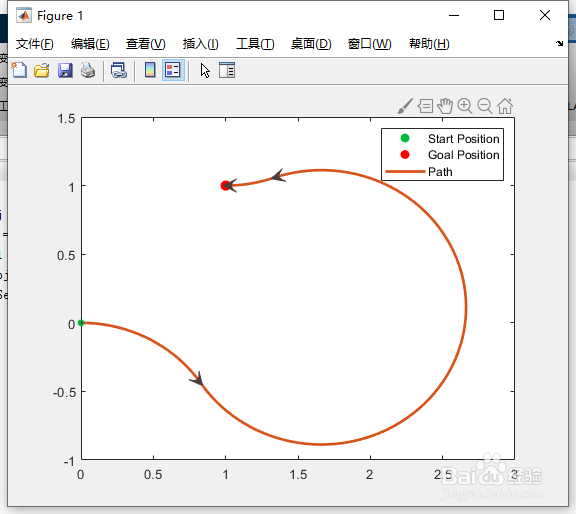
4、显示生成的路径。
show(pathSegObj{1})
5、关闭窗口。
clc