1、首先点击“流程控制模块”中的“永久循环”,这样机器人除了没电以外就不会停止工作。

2、然后点击“数字传感器”中的“人体红外传感器”。
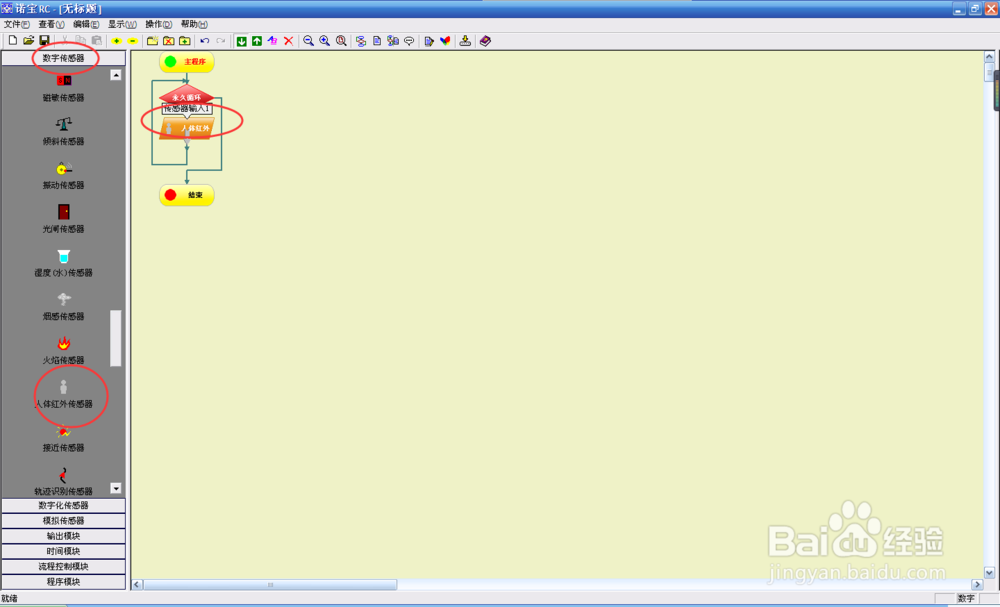
3、再点击“流程控制模块”中的“条件判断”。

4、双击“条件判断”程序并选择“人体红外变量”,然后点击确定。

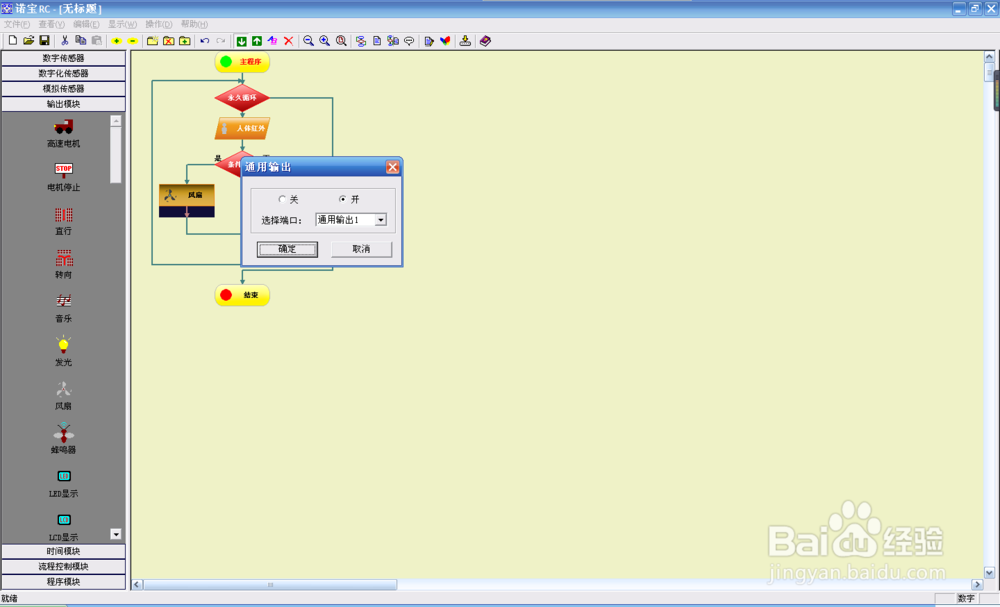
5、在“条件判断”的左右下方各点击添加“输出模块”中的“风扇”。

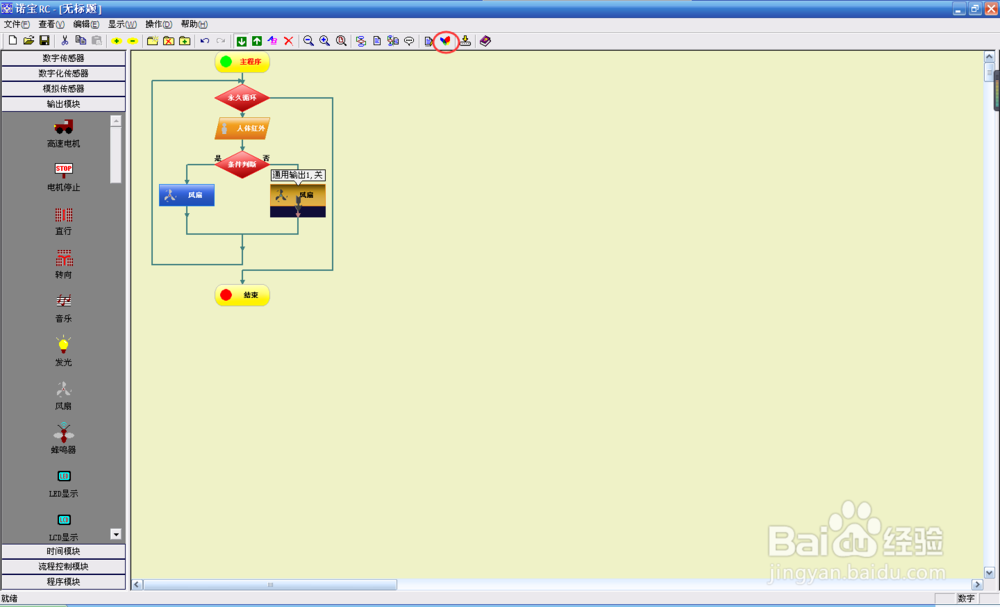
6、左边的“风扇”双击设置选择开启,右边的“风扇”则关闭。

7、点击仿真按钮,进入仿真界面,并在“添加传感源”中添加一个人体传感源。

8、点击小人图案的“仿真”或“3D仿真”即可测试查看效果。


1、如果要放到实体机器人上,组装好机器人并安装好程序就可以啦~
2、如果此经验对你有用,记得要投票并分享哦!
