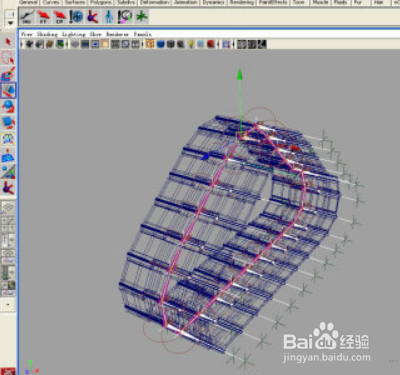
1、首先是履带的模型,由25块板组成,在拼接上板之间的距离完全相同,这样更有利于绑定,因为很多东西我们要通过计算去控制,所以保证数值上的统一是必要的。
2、我们先沿履带上的所有连接点制作一根曲线,其EP点是于履带的连接点对应的。最后要首尾相连,但不用闭合。建立一个float属性aaa,他将作为整个履带运动方式的控制数值。

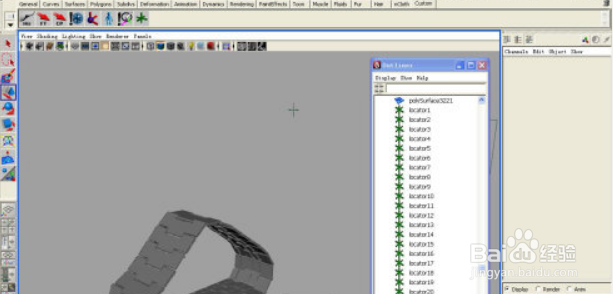
3、建立25个locator,我们将用这25个locator跟随曲线上的取样点运动。建立曲线的取样点节点,命名为pocInfo1,mel:creatNode pointOnCurveInfo -n pocInfo1。

4、将曲线Curve1的属性worldSpace连接取样节点的inputCurve,利用表达式使locator跟随上曲线,采用if语句的原因是aaa数值的正负将控制履带的正转和反转。

5、负值的表达式,吸附locator,创建骨骼,为每一节骨骼创建ik手柄。复制已创建的25个locator,将他们统一移动一段位移,仅在X轴上,利用复制出的locator给ik手柄做极向量约束,使骨骼不会在移动中发生翻转。